
与
化工设计 相关商品:
查看所有与
化工设计 相关商品 >>
 AspenPlusV11/12/14/15化工流程模拟远程安装HYSYS、EDR服务
AspenPlusV11/12/14/15化工流程模拟远程安装HYSYS、EDR服务  水性涂料树脂合成及应用 闫福安 分子设计原理 树脂结构和性能 涂料研究开发应用管理 化学工程与工艺
水性涂料树脂合成及应用 闫福安 分子设计原理 树脂结构和性能 涂料研究开发应用管理 化学工程与工艺  化工设计说明书aspen流程模拟设备选型换热器精馏塔反应器设计CAD
化工设计说明书aspen流程模拟设备选型换热器精馏塔反应器设计CAD 美国卡内基梅隆大学]机器人运动学方程课程PPT下载链接:https://pan.baidu.com/s/1eu1YY-olY1X3a0i2W_pYog 提取码: 2D3D
机器人运动学方程分正解和反解。
正解,是已知各连杆长度(机器人相邻两个关节之间的距离)、关节角度,求机器人末端点位的坐标。
反解,是已知机器人末端点位的坐标,求各轴角度。
![美国卡内基梅隆大学]机器人运动学方程课程PPT,详细讲述了机器人运动学方程的推导过程](https://www.cad2d3d.com/uploads/202309/yundongxue-fangcheng-1.jpg)
![美国卡内基梅隆大学]机器人运动学方程课程PPT,详细讲述了机器人运动学方程的推导过程](https://www.cad2d3d.com/uploads/202309/yundongxue-fangcheng-2.jpg)
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1973.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 法兰密封面型式及其代号详细解释说明,突面 RF、凸面凹面、榫面槽面、全平面和环连接面
法兰密封面型式及其代号详细解释说明,突面 RF、凸面凹面、榫面槽面、全平面和环连接面- 球阀球体安装方式:顶装式TOP ENTRY、侧装式END ENTRY(Side Entry)和底装式BOTTOM ENTRY
- 可燃气体和有毒气体检测报警仪设置标准
- 不敢多想,一想就后怕,我打的销孔可能都不行,做设计越做越害怕
- 紧固件机械性能标准,螺栓、螺钉、螺柱和螺母的性能等级划分,以及搭配使用准则
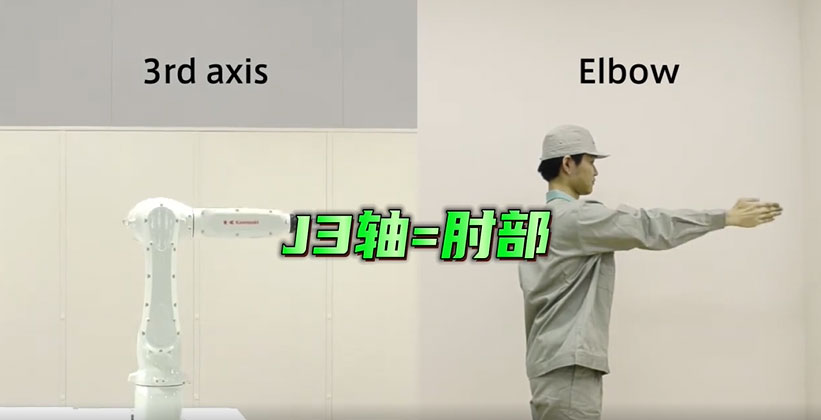 不叫机械臂,就叫机器人,都是关节运动,跟人一模一样
不叫机械臂,就叫机器人,都是关节运动,跟人一模一样- 什么是公用工程站(软管站)?
- 美国帕莱克 Parlec 官网,对刀仪、角度头及反刮刀
- 圆锥密封管螺纹紧固拧紧力矩,Rc螺纹配管拧紧扭矩要求
 美国制造大行程平行开合气动手爪,驱动和同步装置非同寻常
美国制造大行程平行开合气动手爪,驱动和同步装置非同寻常
更多最新发布: 技术教程
-
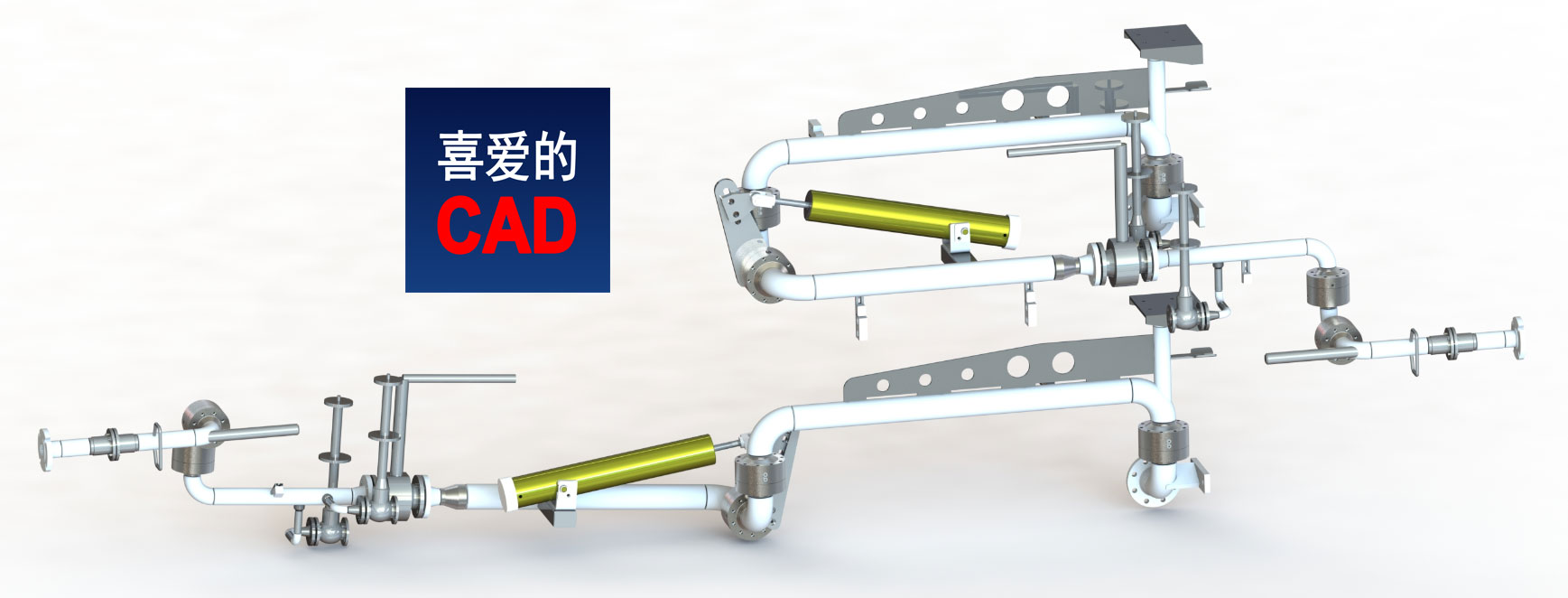 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
-
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
-
中间介质气化器 IFV(Intermediate Fluid Vaporizer)运行原理、内部构造和高清实物图
-
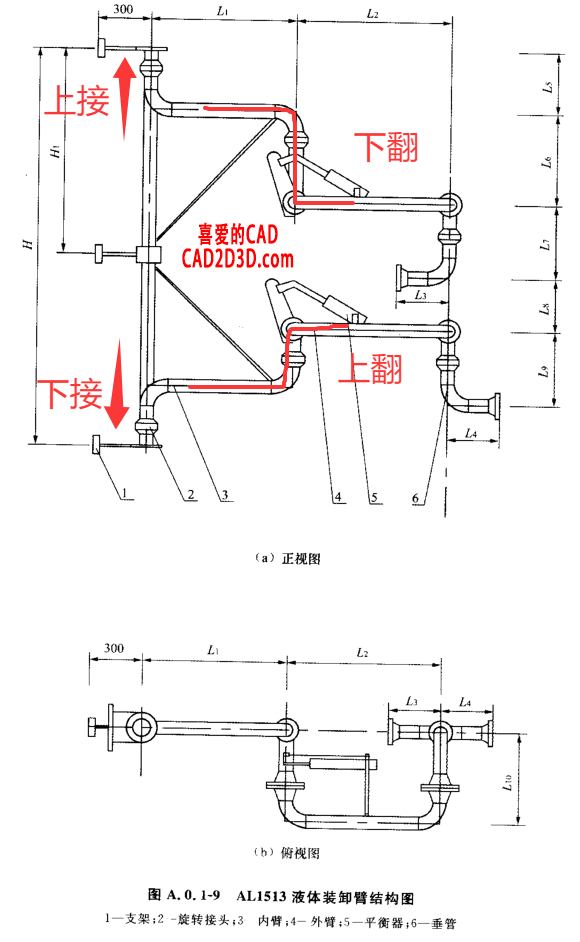 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
-
标准中的 必须、严禁、应、不应、不得、宜、不宜、可 的用词说明
-
SH∕T 3221-2023 石油化工物料汽车装卸设施设计标准有关装卸速度(流速)的要求
-
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
-
GB 50093 自动化仪表工程施工及质量验收规范 温度、压力取源部件安装规定、条文解释说明及案例解析
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载