
与
协作机器人 相关商品:
查看所有与
协作机器人 相关商品 >>
 六轴便携式协作码垛机器人流水线装箱纸箱搬运机械臂自动码垛拆垛
六轴便携式协作码垛机器人流水线装箱纸箱搬运机械臂自动码垛拆垛  智能便携式协作机器人码垛机器人纸箱搬运上下料免编程高精度
智能便携式协作机器人码垛机器人纸箱搬运上下料免编程高精度  全自动纸箱码垛机包装流水线堆箱码货机械臂便携式协作机器人码垛
全自动纸箱码垛机包装流水线堆箱码货机械臂便携式协作机器人码垛 常见的6轴机器人,机器人控制器控制6个轴动作利用差补方法实现机器人终端路径行走,6轴联动,精度很差,因此很难利用机器人行走实现高精度的直线、圆弧、面等路径。比如轴孔装配,由于机器人重复路径精度不高,轴可能会卡在孔中间,很难将轴完全插入到孔内。
为了利用机器人来实现高精度的路径,我们可以借助辅助工装和机器人软浮动功能,辅助工装纠正路径,机器人提供动力,比如可以利用导轨滑块实现高精度路径,机器人提供前进的动力。
机器人重复位置精度(RP)的定义:对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。
机器人重复路径精度(RT)的定义:对同一指令轨迹重复n次时实到轨迹的一致程度。
机器人重复位置精度(RP)和机器人重复路径精度(RT)定义的详细说明和试验方法请参见 GB/T 12642-2013 / ISO 9283:1998 工业机器人 性能规范及其试验方法
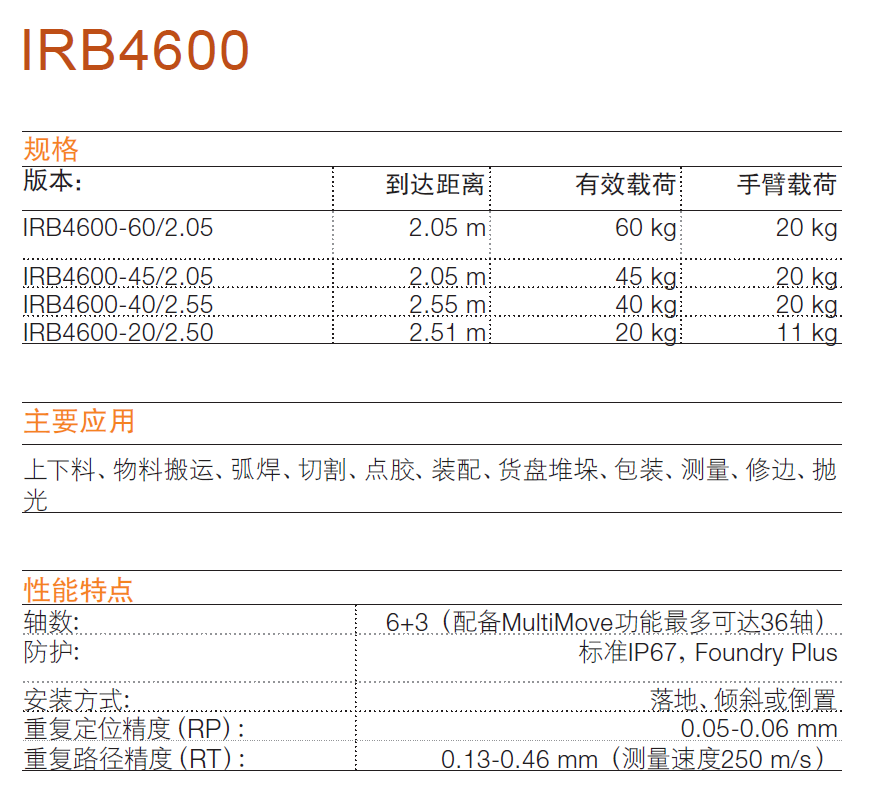
比如ABB IRB4600机器人的重复位置精度0.05·0.06mm,而重复路径精度0.13·0.46mm,重复路径精度还跟测量速度有关。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-824.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
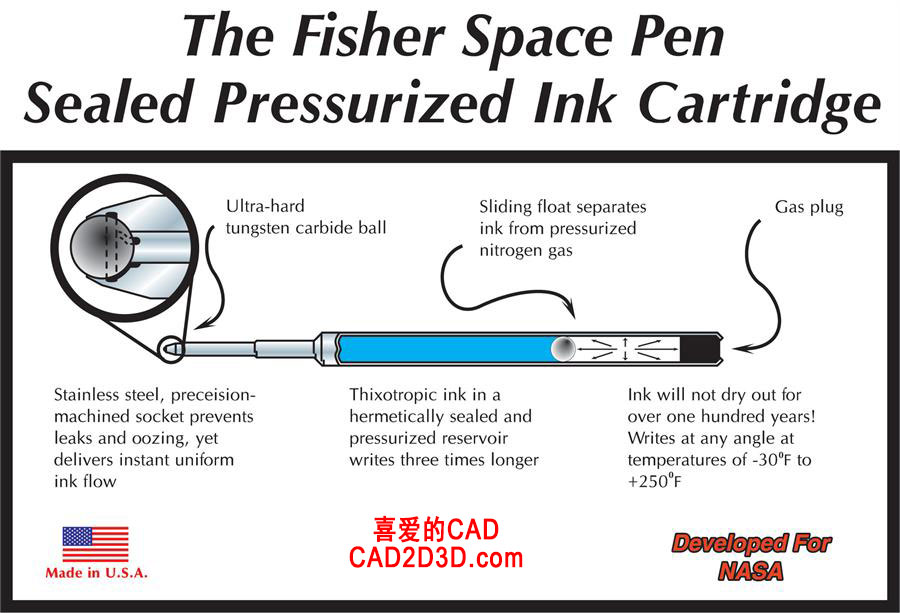 一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单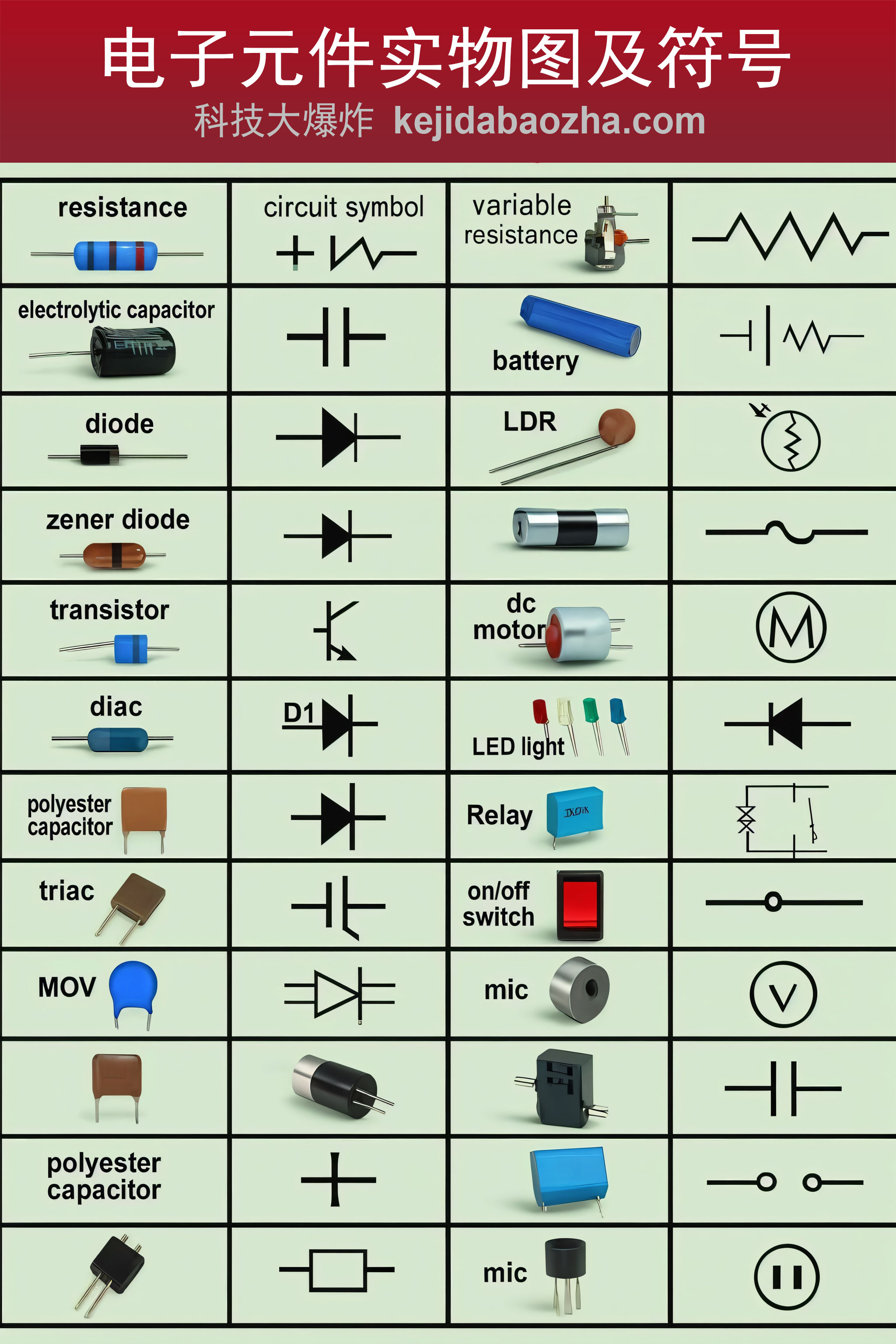 电子元件大全及对应的实物图,电子元件中英文名称对照
电子元件大全及对应的实物图,电子元件中英文名称对照 快速接头类型、规格、压力等级和温度等级,快速接头标准,Kamlok Quick Disconnects
快速接头类型、规格、压力等级和温度等级,快速接头标准,Kamlok Quick Disconnects- DBB、DIB、DIB-1、DIB-2 球阀内部构造和原理,密封结构与泄压方向说明
- 西门子PLC和三菱PLC的区别,如何选择通讯协议
- 日本小原齿轮工业官网(KHK),专业齿轮制造商
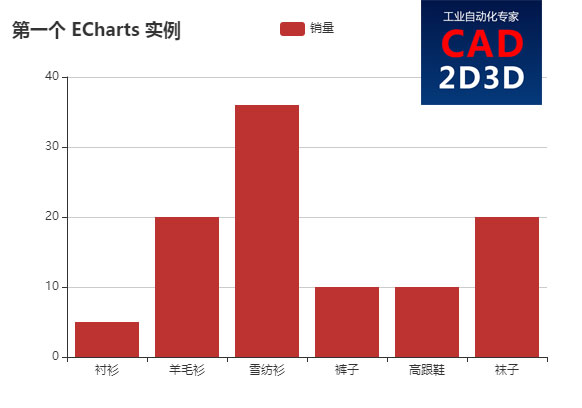 数据采集与监视控制系统(SCADA)图表可视化实现方法 — ECharts 库,支持曲线图、饼状图、柱状图、区域图、雷达图等
数据采集与监视控制系统(SCADA)图表可视化实现方法 — ECharts 库,支持曲线图、饼状图、柱状图、区域图、雷达图等 什么是协作机器人?
什么是协作机器人? 激光切割机、圆盘高速锯、等离子切割机 说明介绍及钢板切割厚度适用范围
激光切割机、圆盘高速锯、等离子切割机 说明介绍及钢板切割厚度适用范围 剪刀式折叠升降机STP通用格式3D源文件免费下载
剪刀式折叠升降机STP通用格式3D源文件免费下载
 LNG 槽车加注预冷采用上进液还是下进液?
LNG 槽车加注预冷采用上进液还是下进液?
 卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
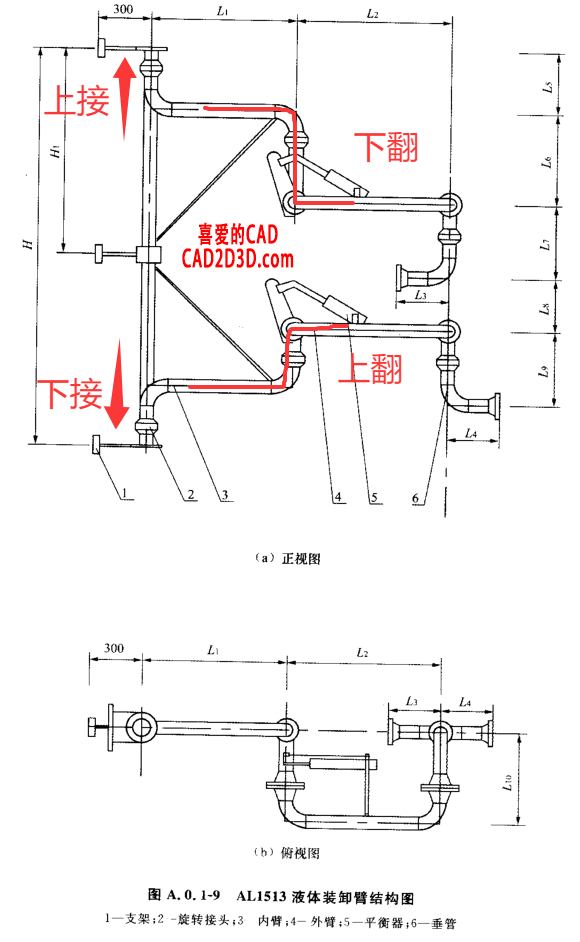 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载