皮带传动大减速比回转运动机构
皮带 传动 大 减速 比 回转 运动 机 构
We 另外 , 通 过 改变 从 动 皮带 轮 和 固定 皮带 轮
¥ o 的 直径 比 , 也 可 得 到 同样 的 结果 。
i 设计 要 点
1 网 盘 与 行星 皮带 轮 的 固定 必须 牢固。
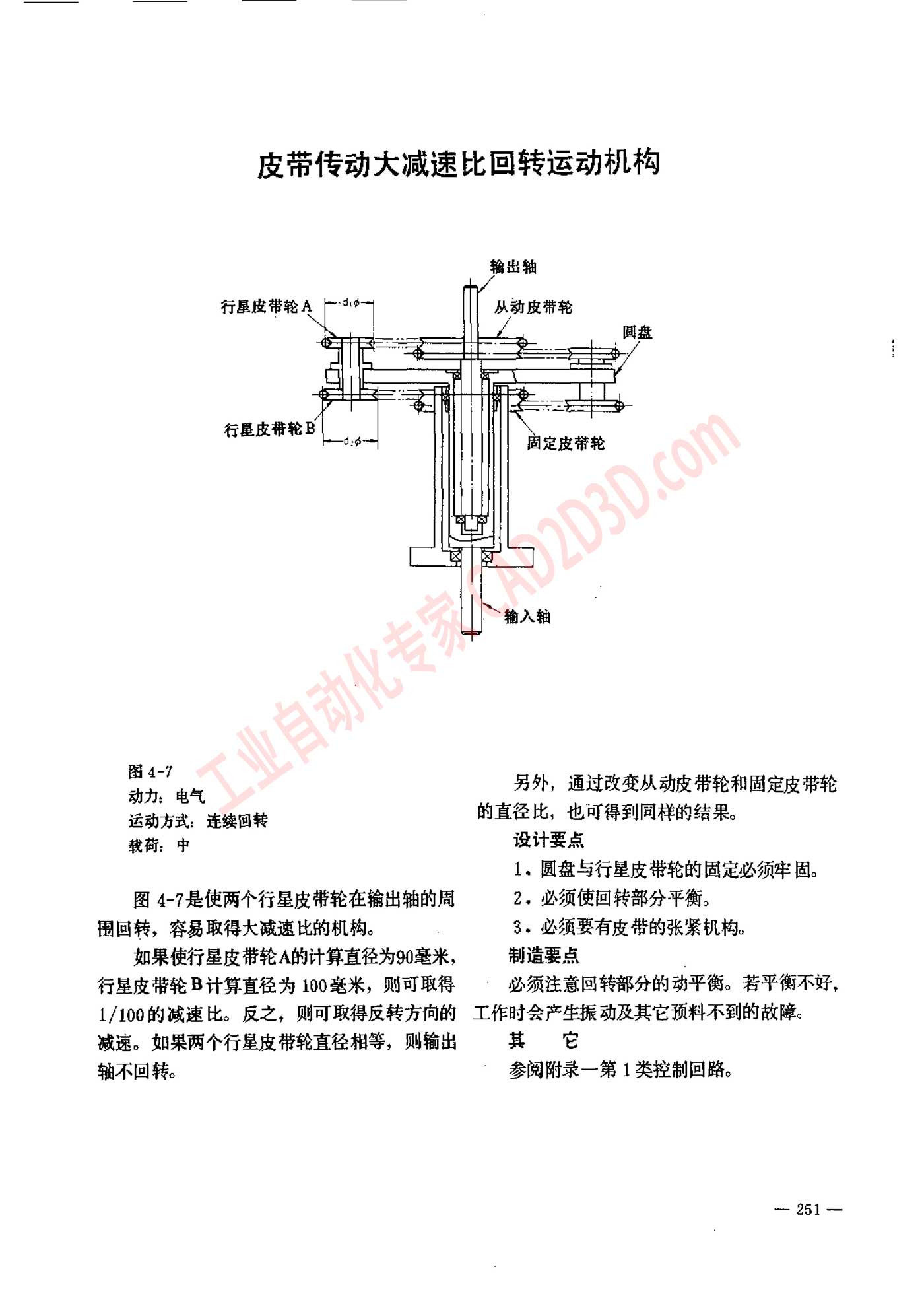
图 4-7 是 使 两 个 行星 皮带 轮 在 输出 轴 的 周 2 必须 使 回转 部 分 平衡 。
围 回 转 , 容 易 取 得 大 减速 比 的 机 构 。 3. 必须 要 有 皮带 的 张 紧 机 构 。
如 果 使 行星 皮带 轮 A 的 计算 直径 为 90 毫 米 , 制造 要 点
行星 皮带 轮 3 计 算 直 径 为 100 毫 米 , 则 可 取得 必须 注意 回转 部 分 的 动 平衡 。 若 平衡 不 好 ,
1/100 的 减速 比 。 反 之 , 则 可 取得 反 转 方向 的 “工作 时 会 产生 振动 及 其 它 预 料 不 到 的 故障 。
减速 。 如 果 两 个 行星 皮带 办 直径 相等 , 则 输出 其 它
轴 不 回转 。 ” 参 阔 附录 一 第 1 类 控制 回路 。
- 251 —
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)