
与
SolidWorks 相关商品:
查看所有与
SolidWorks 相关商品 >>
 SW SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2
SW SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2  Sw SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2
Sw SolidWorks软件远程安装2025/2024/2023/2022/2021/2020/2  SolidWorks2025软件零基础学习视频CAD教程SW2020 2018钣金设计课
SolidWorks2025软件零基础学习视频CAD教程SW2020 2018钣金设计课 简单的机器人行走路径可以通过现场示教点位的方式实现,对于打磨、焊机等复杂路径的编程一般采用离线编程,也就是说在计算机上完成建模仿真,自动生成机器人行走路径,对于日本FANUC机器人的离线编程,可以采用ROBOGUIDE仿真程序,使用CAD TO Path 功能,选择3D模型的边线,自动生产机器人行走轨迹。

步骤1:导入零件3D模型,机器人手爪TCP点设置。
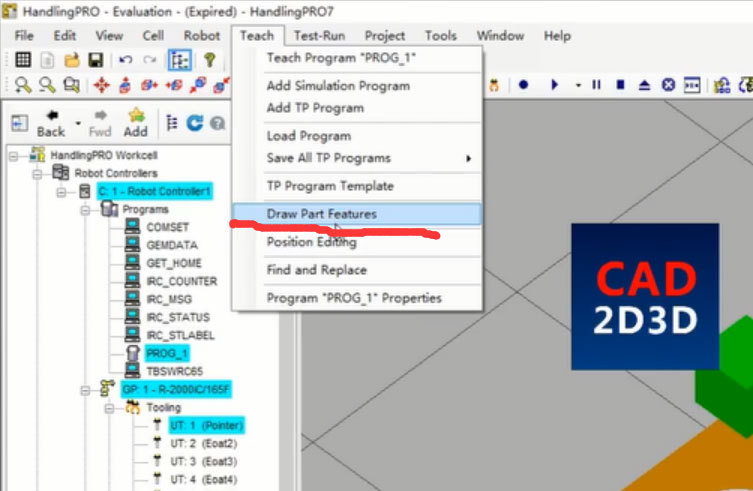
步骤2:菜单栏/Teach/Draw Part Features 打开CAD To Path对话框。
步骤3:根据需要选择路径选择工具,本例选用Edge Line,鼠标滑过目标边线,双击选中。

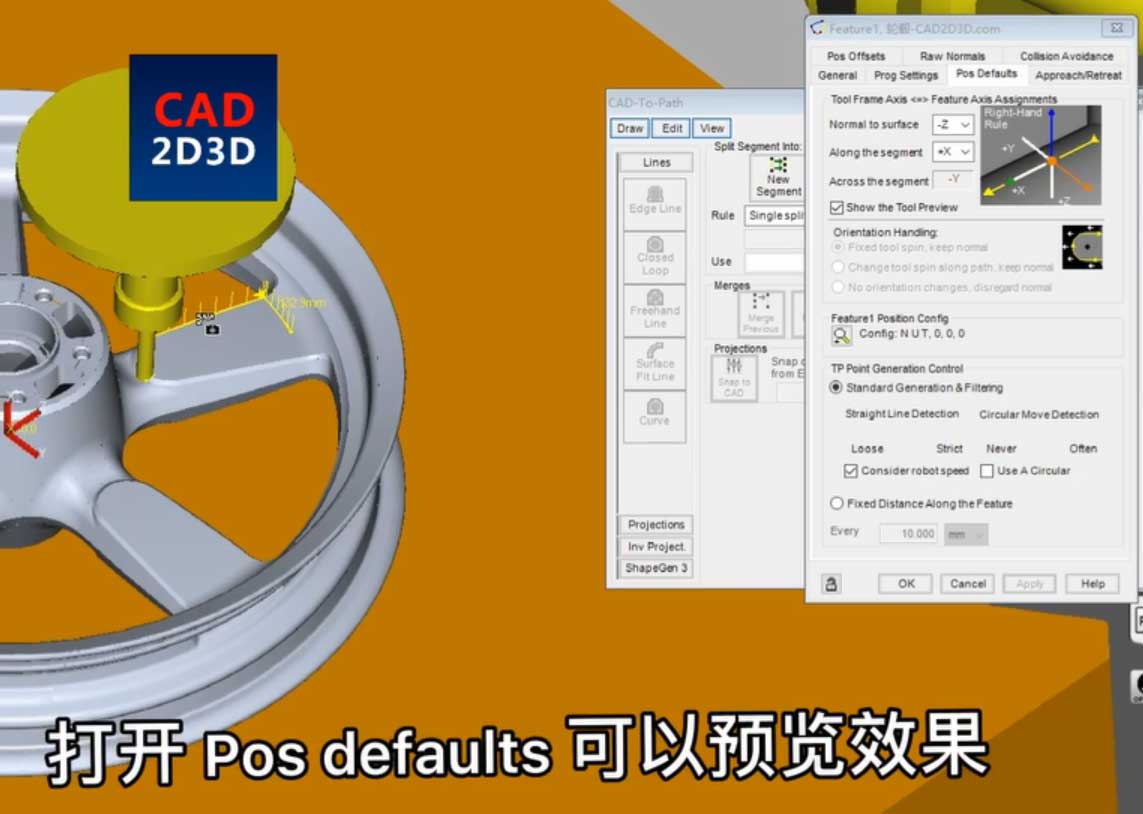
步骤4:打开 Pos Defaults,可以预览手爪的姿势。
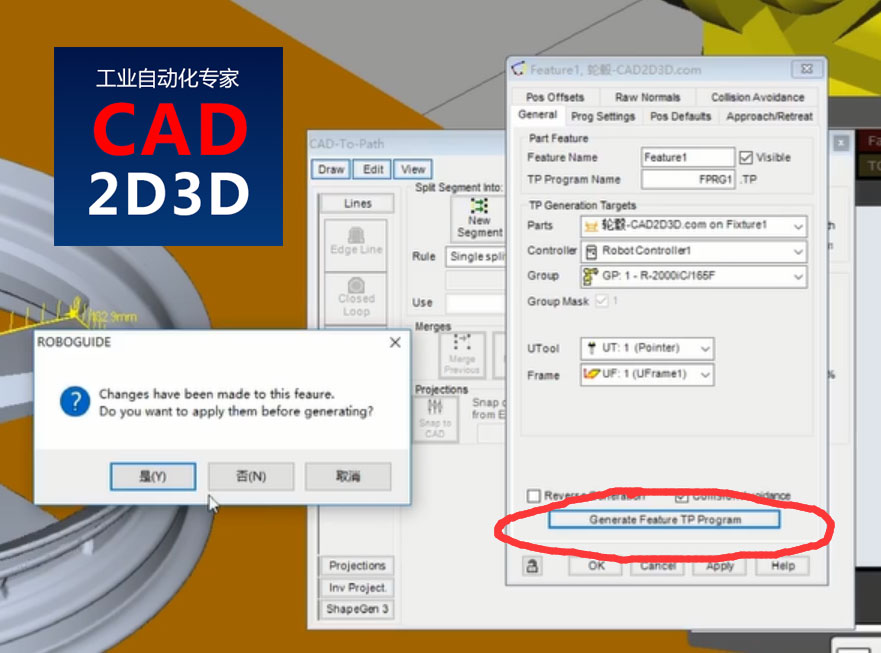
步骤5:点击下方的 Generate Feature TP Program,自动生产机器人程序。
未完待续 ~
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1392
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1392.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 轴承种类及对应的实物图,各种轴承名称的中英文对照
轴承种类及对应的实物图,各种轴承名称的中英文对照 大开眼界,非接触式磁性齿轮传动,没有摩擦,完美无瑕
大开眼界,非接触式磁性齿轮传动,没有摩擦,完美无瑕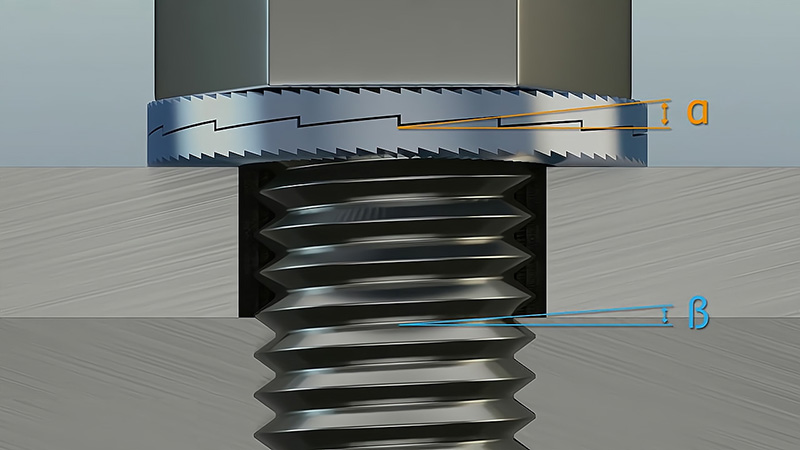 楔形永不松动垫圈振动试验,瑞典50年前的发明依然强大无比
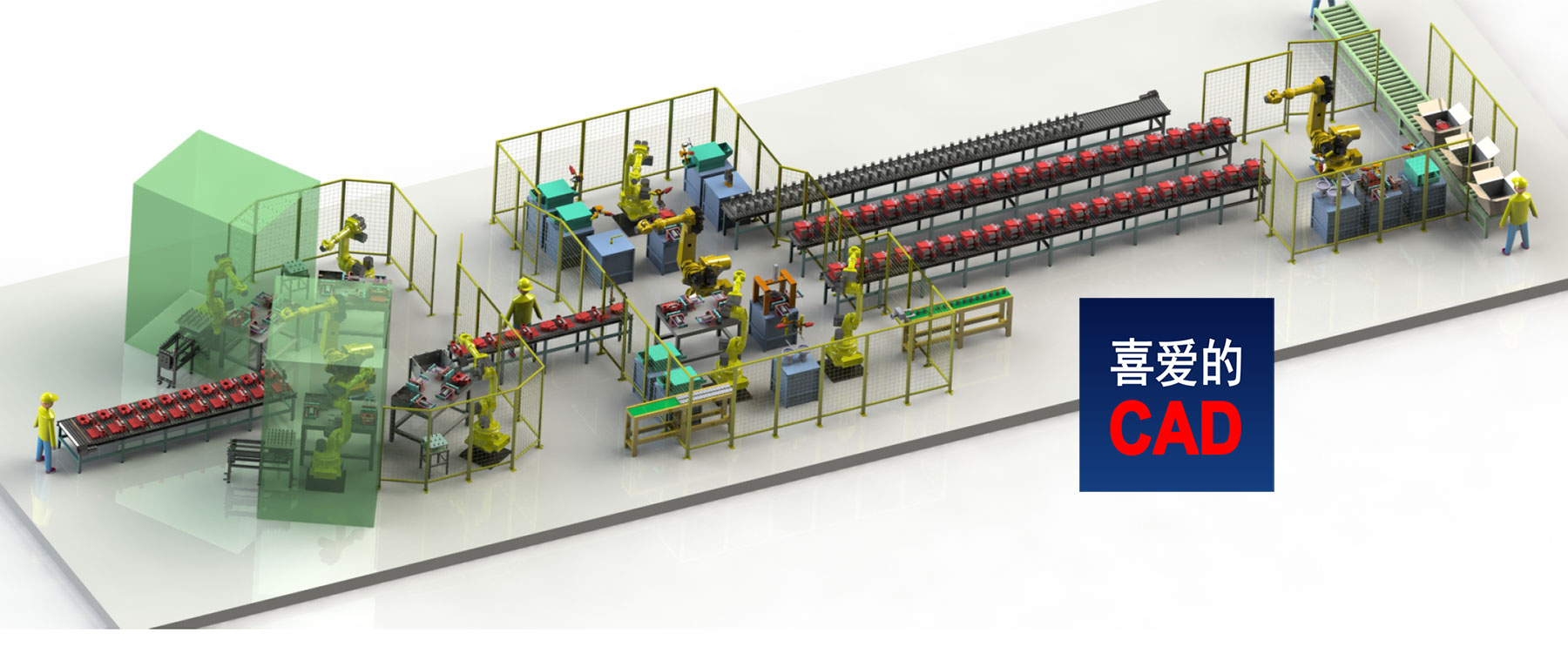
楔形永不松动垫圈振动试验,瑞典50年前的发明依然强大无比 日本公司做的机加工生产线,代表了当前机加工自动化最高水准!
日本公司做的机加工生产线,代表了当前机加工自动化最高水准! 制动盘机加工自动化生产线,桁架+倒挂机器人,无人黑灯车间来了
制动盘机加工自动化生产线,桁架+倒挂机器人,无人黑灯车间来了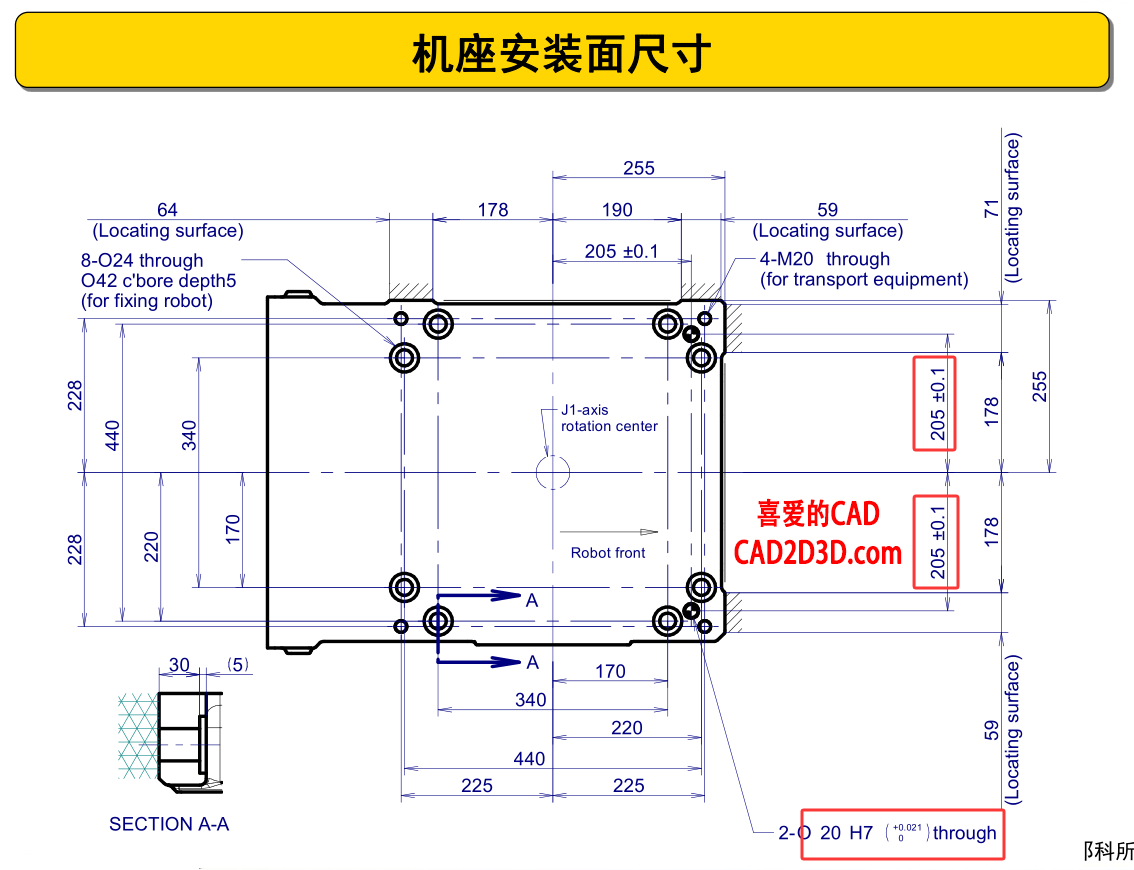 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
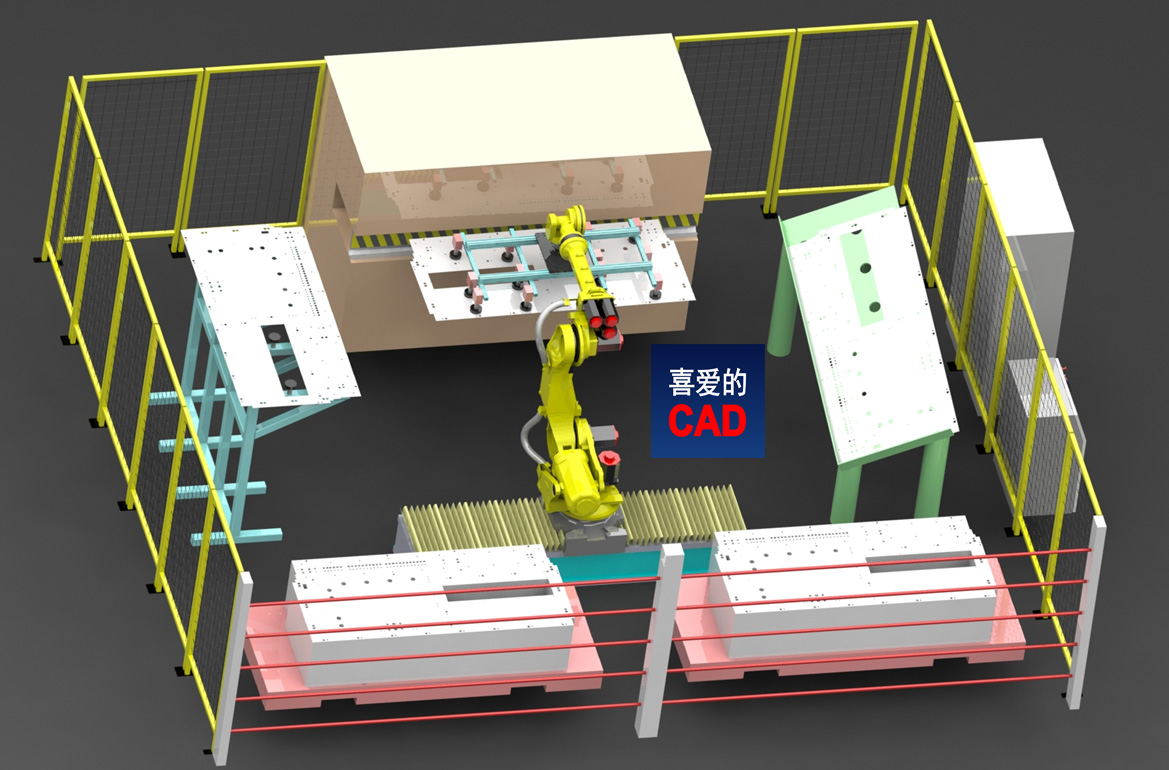
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载