
与
CAD 相关商品:
查看所有与
CAD 相关商品 >>
 CAD软件远程安装2006-2026定制服务2014插件包Mac正2020 2021M1版
CAD软件远程安装2006-2026定制服务2014插件包Mac正2020 2021M1版  3D效果图制作CAD代画施工画图装修室内设计3dmax建筑景观制图代做
3D效果图制作CAD代画施工画图装修室内设计3dmax建筑景观制图代做  CAD软件远程安装 auto2007-2026中文版cad2020 2021MAC/CAD软件包
CAD软件远程安装 auto2007-2026中文版cad2020 2021MAC/CAD软件包 平行开闭型手爪有2爪、三爪和四爪,虽然爪子数量不同,但内部结构和选型方法都是相似的,下面详细介绍一下SMC平行开闭手爪的内部构造和选型步骤。SMC手爪样册下载地址:见页面底部下载地址
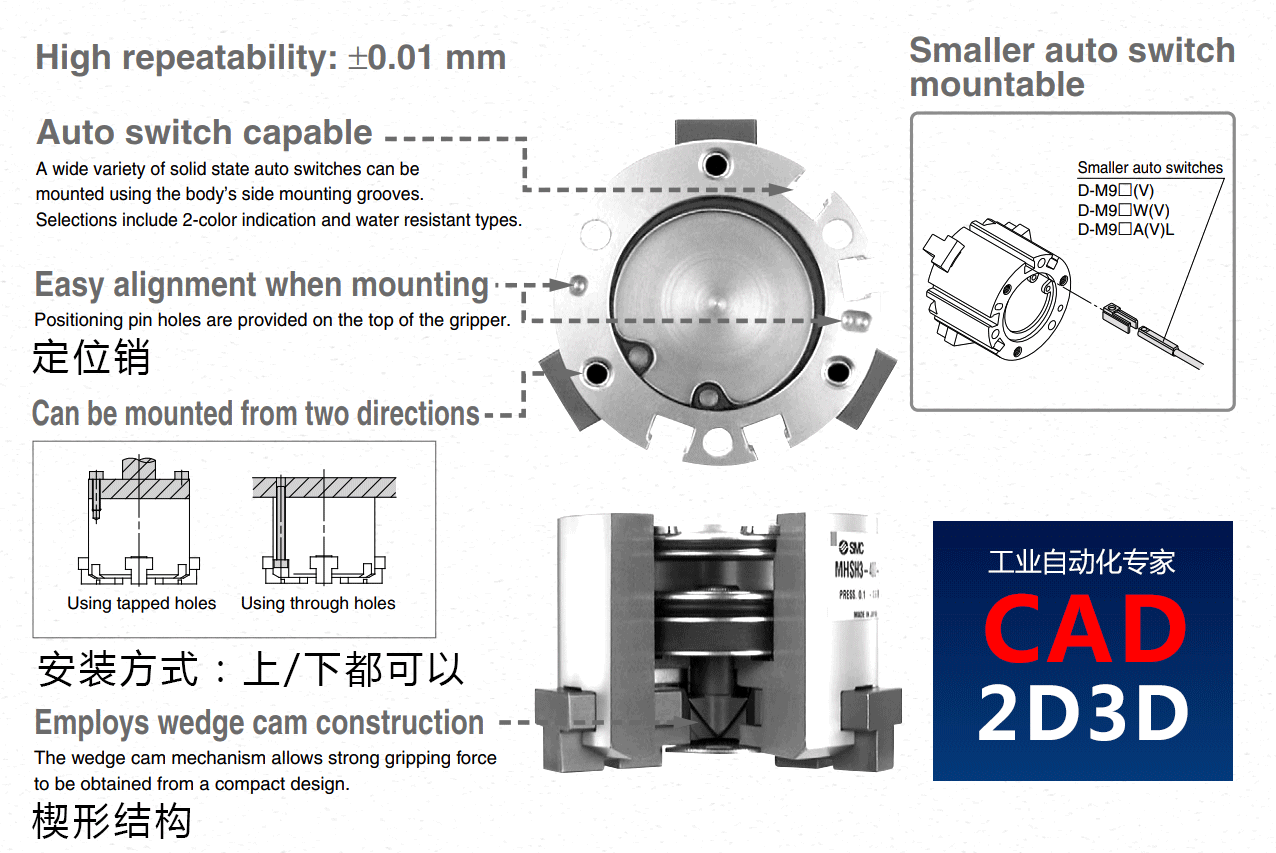
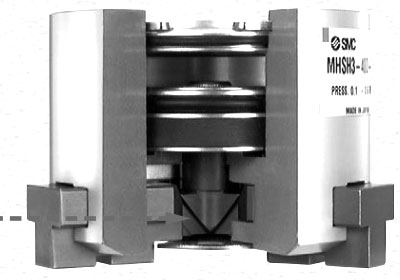
1. 平行开闭型手爪内部结构
手爪安装面设置定位孔,手爪可以从顶面或底面安装,手指采用楔形结构传力,实现±0.01mm定位精度。
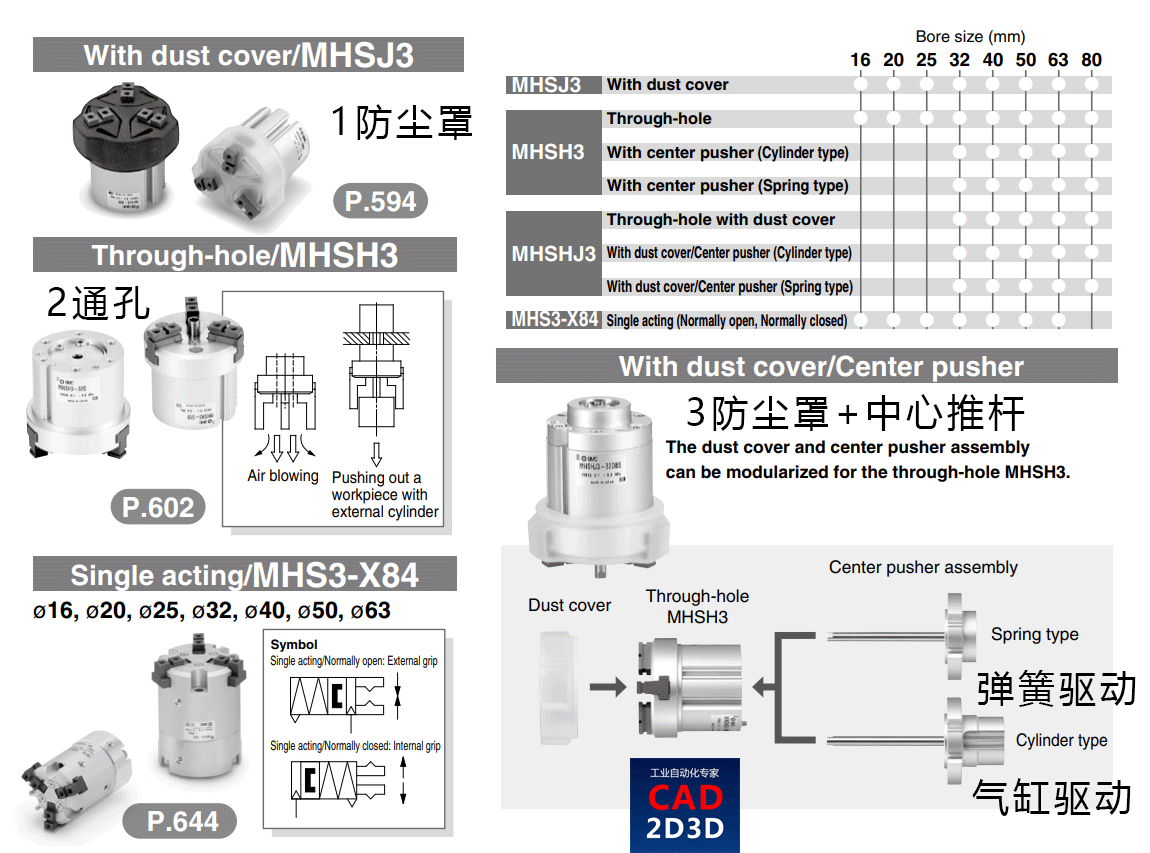
另外,手爪还可选配防尘罩、中心通孔、中心推板的结构。中心通孔可以用来通压缩空气,中心推板有气缸和弹簧驱动两种形式。
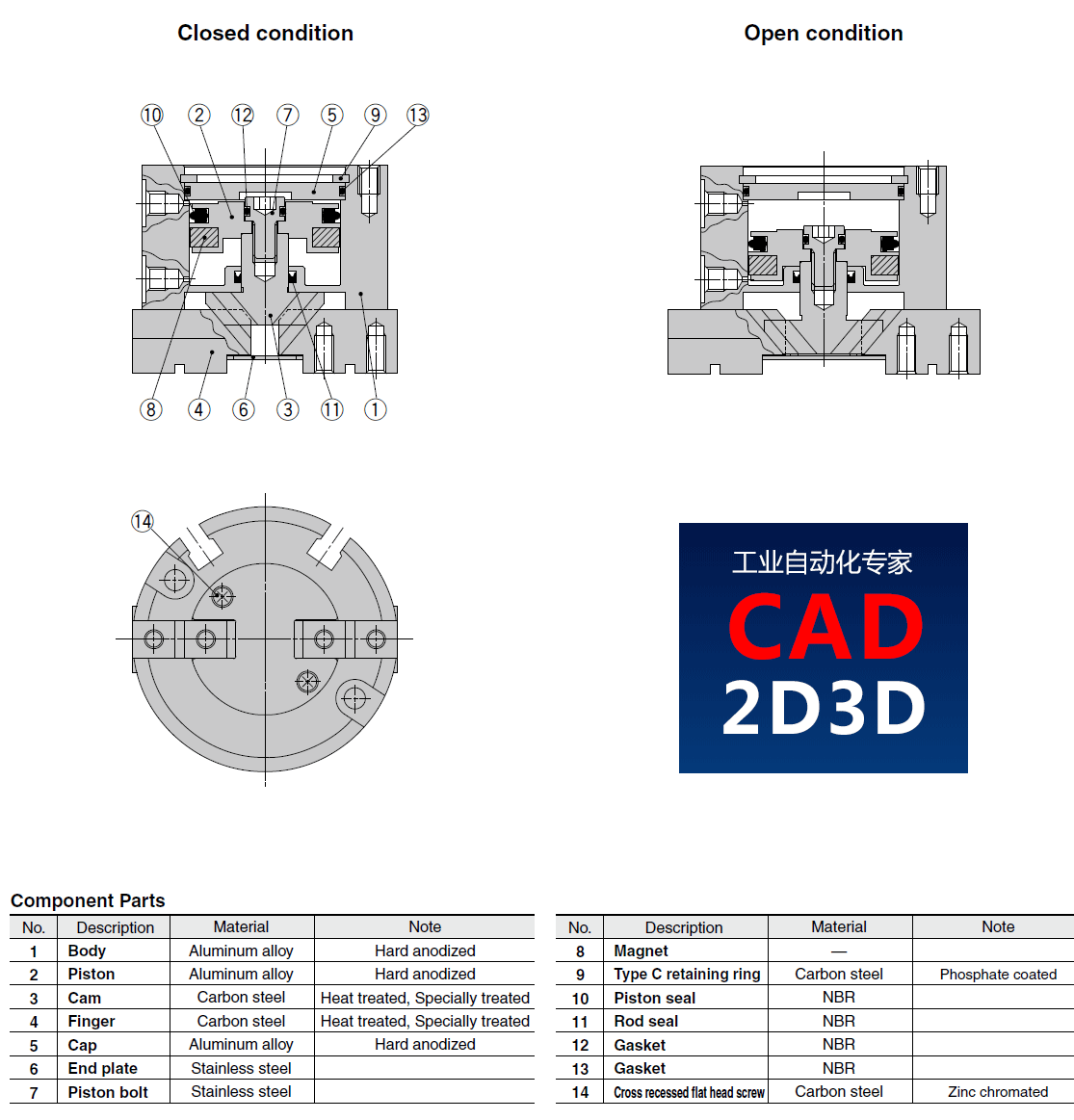
手爪主要由缸体、活塞杆、磁环、密封圈等组成。
2 手爪选型步骤
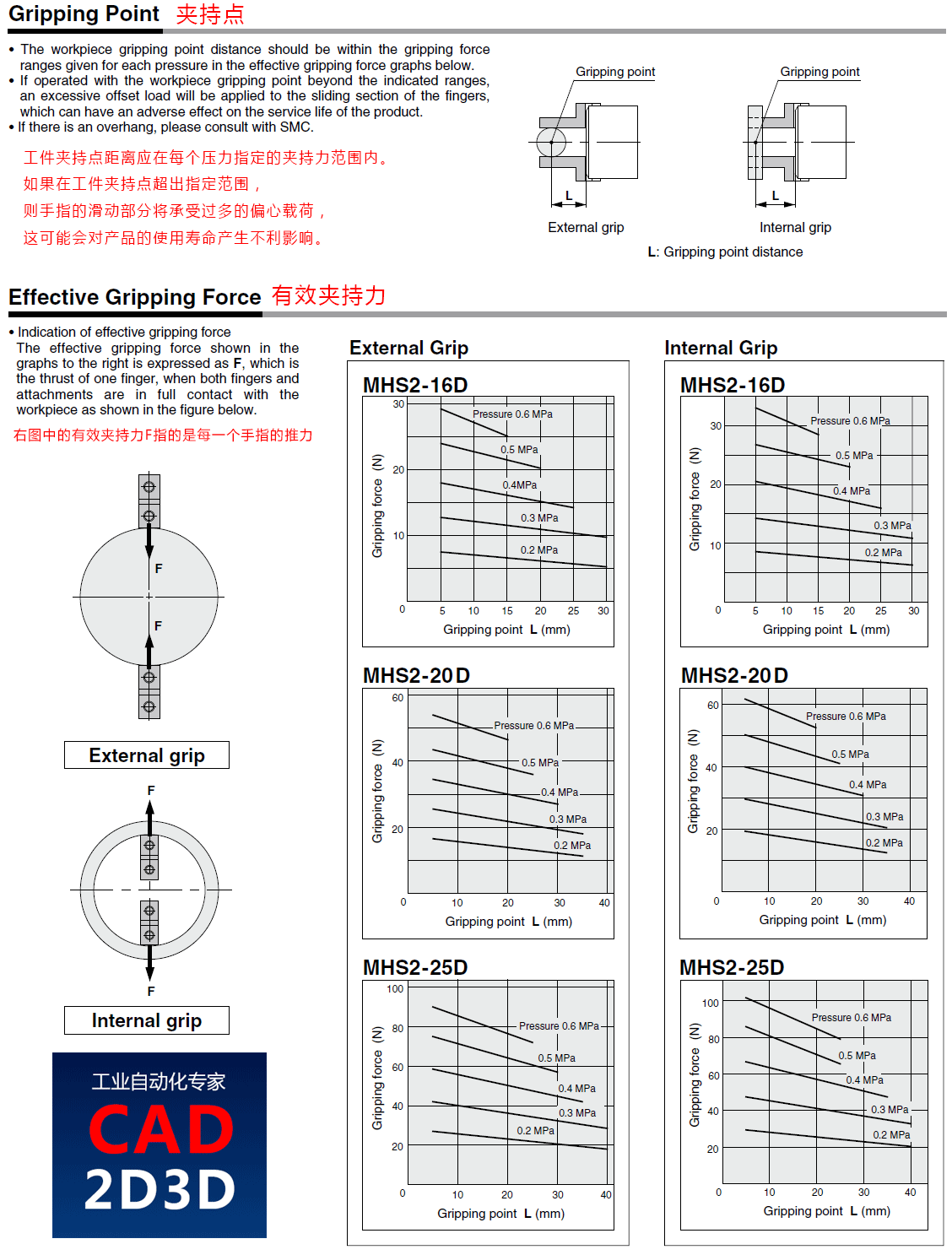
- 步骤1 确定夹持力
- 步骤2 确定夹持点距离
夹持力可以取工件重量的10~20倍,根据抓取方式和工件尺寸确定夹持点距离,随着夹持点距离的增加,夹持能力在下降。
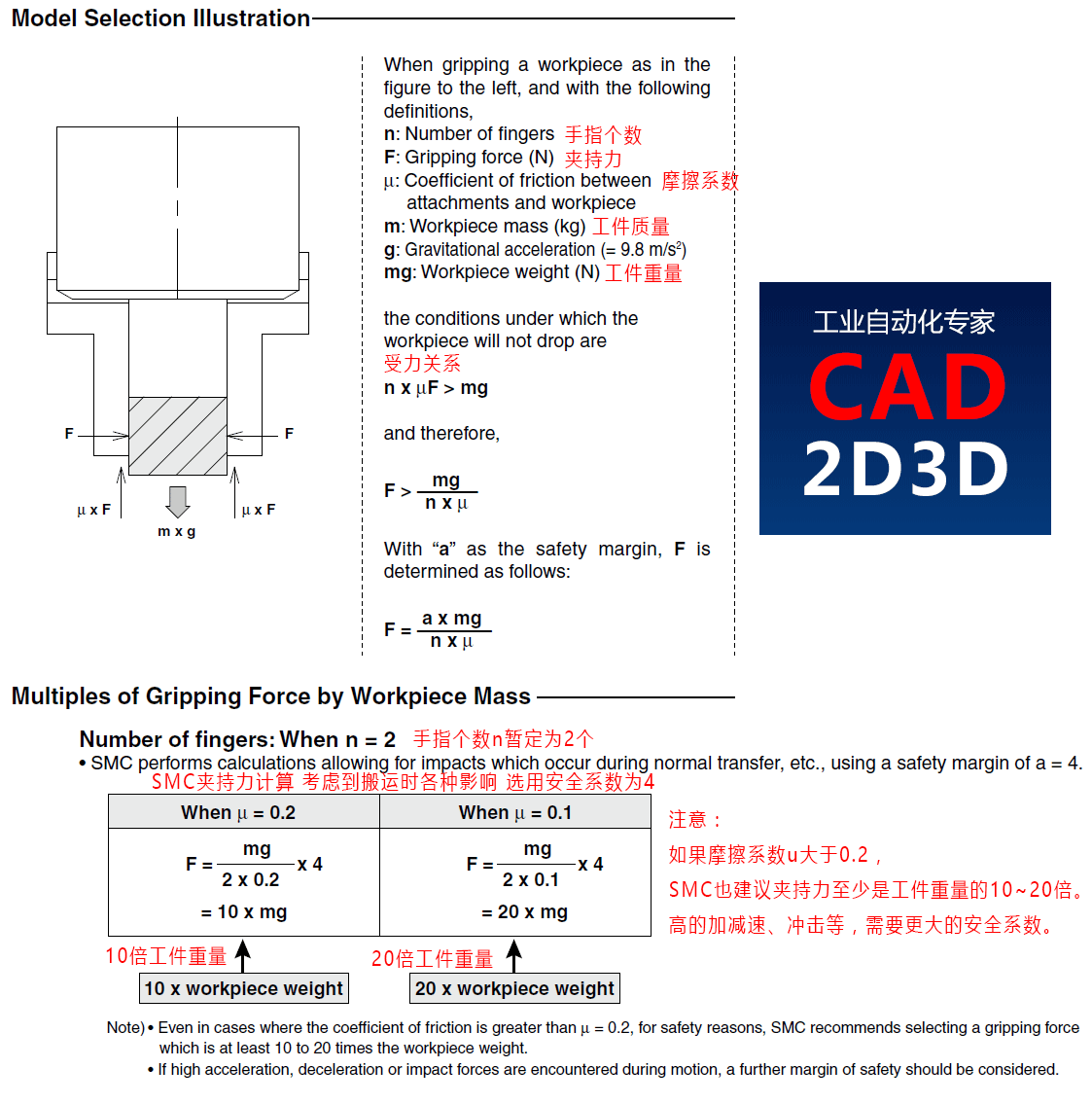
夹持点距离是指工件(含手指)中心离滑块安装面的距离,有效夹持力指的是每个手爪的推力。
 下载地址:
下载地址: 转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1419.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 RV 减速机没技术含量了?连国内送丝机厂商都能造,日本巨头慌不慌?
RV 减速机没技术含量了?连国内送丝机厂商都能造,日本巨头慌不慌? 如果移动该机床,机器将失去自动运行功能,日本机床这么霸道吗?
如果移动该机床,机器将失去自动运行功能,日本机床这么霸道吗? 机床对刀仪,非接触式,精度1um,国内一片空白,只能望洋兴叹
机床对刀仪,非接触式,精度1um,国内一片空白,只能望洋兴叹 钻长孔内冷钻头 钻孔视频
钻长孔内冷钻头 钻孔视频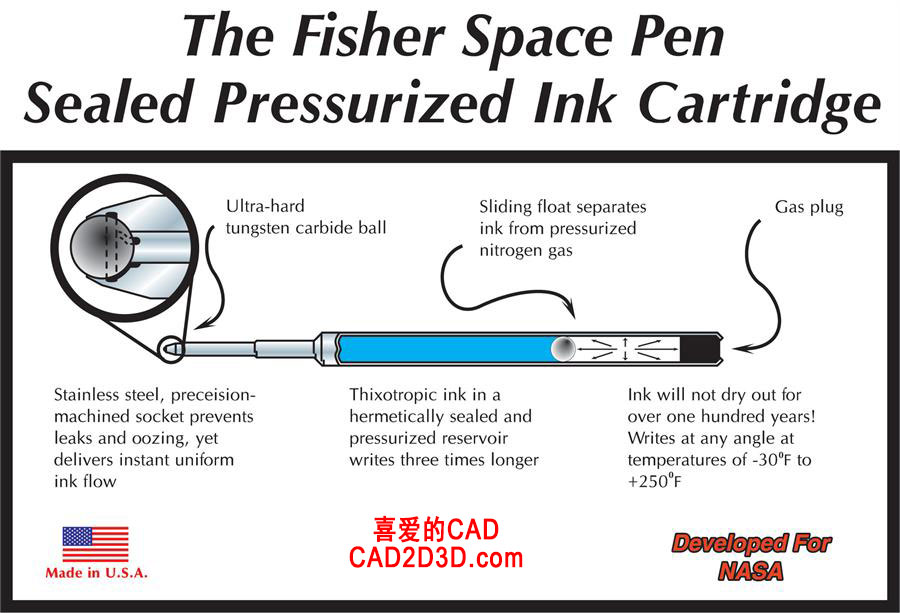 一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
 塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
 油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
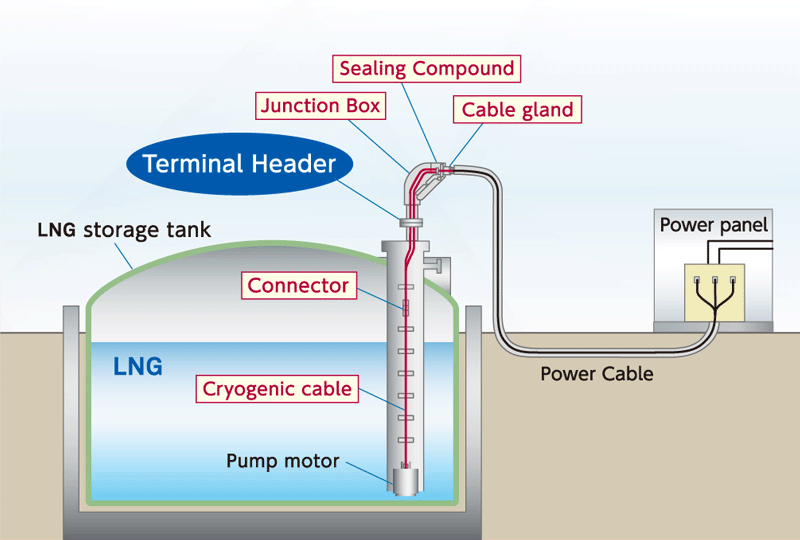 LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
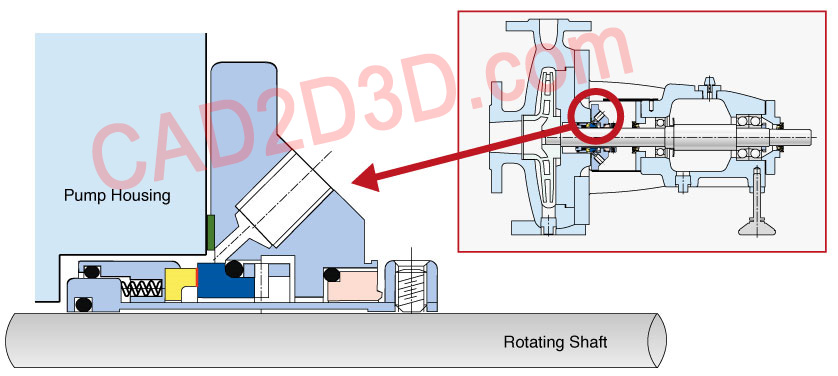 泵机械密封组成、内部构造和运行原理
泵机械密封组成、内部构造和运行原理
 减速机种类、特性及其优劣势
减速机种类、特性及其优劣势
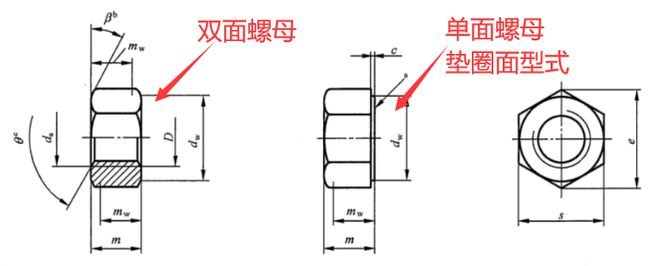 惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载