
 小型气动SC32大推力带磁SC63标准气缸SC40X50X63X80X100-25-75-S
小型气动SC32大推力带磁SC63标准气缸SC40X50X63X80X100-25-75-S  SC气缸小型气动标准大推力大全带磁32 40 50 63 SC80 100 125 160
SC气缸小型气动标准大推力大全带磁32 40 50 63 SC80 100 125 160  TDA双轴双杆气缸大推力小型气动TN10/16/20/25/32/40-100-20-50-S
TDA双轴双杆气缸大推力小型气动TN10/16/20/25/32/40-100-20-50-S FANUC公司提供了一个机器人负荷计算分析表格,根据负载中心位置、重量、转动惯量来核算机器人是否满足使用要求。
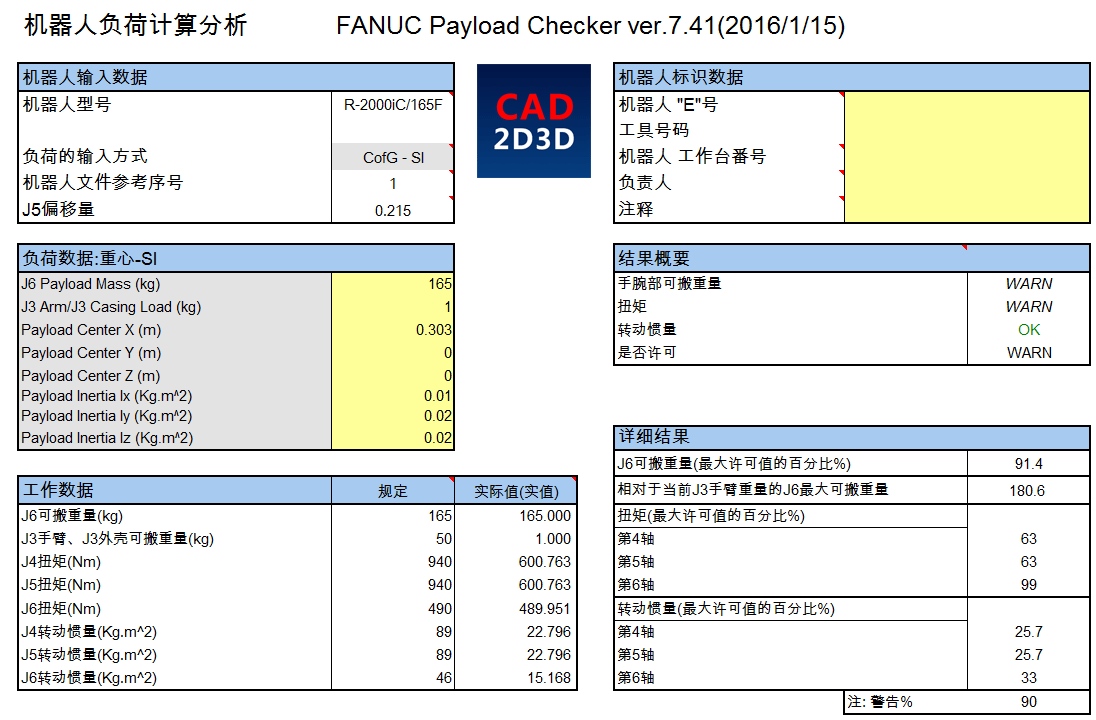
此工具是FANUC公司 为了确定某些特定机器人的手腕部负荷而提供的工具,FANUC尽最大努力保证表单计算公式和数据的正确性,但是FANUC不保证结果没有任何问题。
此工具计算出的结果和机器人控制装置计算出的结果之间可能有些误差,从版本7.20开始,计算时用到的重力加速度从9.81改成9.8,所以老版本、7.20以后版以及机器人控制装置三者计算出来的结果之间会有些不同。
设计此工具的目的是检查机器人手腕部负荷状态,它能够解答以下问题:
- 手腕部的扭矩是否在设计许可范围内
- 手腕部的转动惯量是否在设计许可范围内
- 是否许可机器人在此条件下工作
负荷数据的输入有两种方式:
- 如果事先已知各个轴的扭矩和转动惯量,可以作为轴的数据直接输入
- 扭矩和转动惯量未知的情况下,可以按照重量、重心和自身转动惯量的方式输入,扭矩和转动惯量是自动计算并关联到其他表单(常用)
- 值可以按照SI单位制或者PID单位制输入
机器人型号可以从列表里面选择。如果想考察不同型号的机器人在此负荷下的情况的话,可以直接选择其他机器人型号。
计算结果分为结果概要和结果详细两个部分:
- 只有结果概要的所有项目都显示OK,才表示负荷是允许的。结果概要的含义请参照[结果的判断方法
- 结果详细部分显示负荷条件和设计许可值之间的偏差,超负荷的情况下,可以根据详细结果的数据,稍微改变工具或者选择其他型号的机器人,然后再进行分析,使得负荷在许可范围之内。
机器人负荷计算分析表中的 负荷输入方式 优先选择 重心-SI,轴的扭矩和转动惯量会自动算出。选择重心-SI 之后,负荷数据 中的 Payload inertia Ix(Kg.m^2)、Payload inertia Iy(Kg.m^2)、Payload inertia Iz(Kg.m^2) 都是围绕此重心并对其TCP坐标系的转动惯量。
这3个转动惯量的数值可由3D软件自动计算出来,SolidWorks转动惯量计算方法请参见:https://www.cad2d3d.com/post-590.html,下图中的第2行里的 Lxx Lyy Lzz 就是负载的转动惯量Ix Iy Iz。(由重心决定,并且对齐输出的坐标系)
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-604.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 机械工程师会失业吗?再次也能找个物业维修的活吧!
机械工程师会失业吗?再次也能找个物业维修的活吧! 装车橇设计大师:安全阀构造、选型和安装
装车橇设计大师:安全阀构造、选型和安装- 老外想钱想疯了?瑞士制造的扳手卖592元,而国产7.5元包邮,国外扳手明明很贵,老板为何还是选择了瑞士制造?
- 机器人按摩有希望吗?男人找按摩真的是为了按摩吗?
- 一把剪刀12000元,明明是一个只有9人的小作坊生产的,凭啥卖这么贵?
- 日本哈默纳科官网(HarmonicDrive),主营谐波减速机
- 德国威腾斯坦(WITTENSTEIN)公司官网,提供机电一体驱动系统的所有主要技术
- 球阀 TRN/FB/FS 代表什么意思?
- 气缸与导轨滑块连接方式,采用浮动接头结构,避免活塞杆受额外负载
- 机床超声波加工技术,高频微振刀,促进断屑,提高机加工质量
 LNG 槽车加注预冷采用上进液还是下进液?
LNG 槽车加注预冷采用上进液还是下进液?
 卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
卡套式接头连接和密封可靠吗?总感觉压力大了或时间长了它会松动
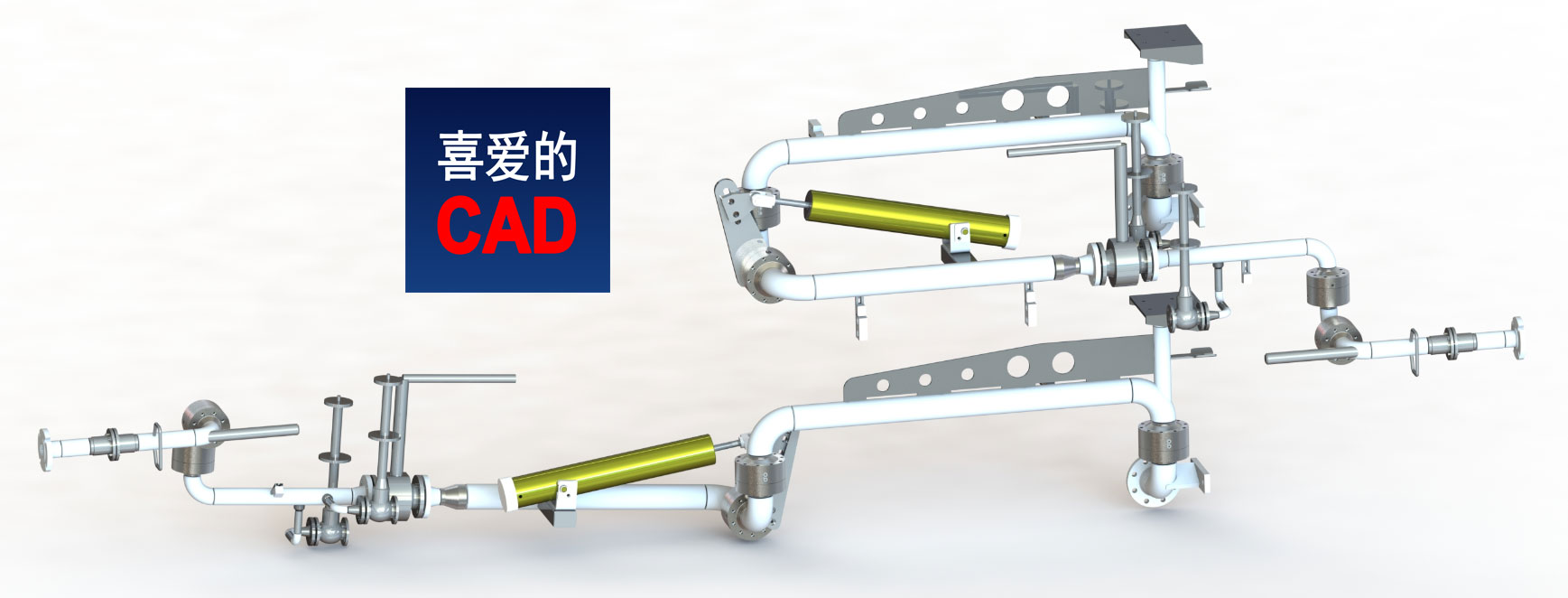 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
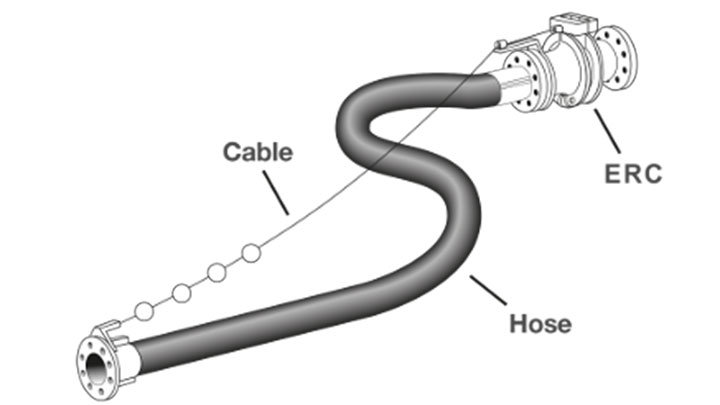 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
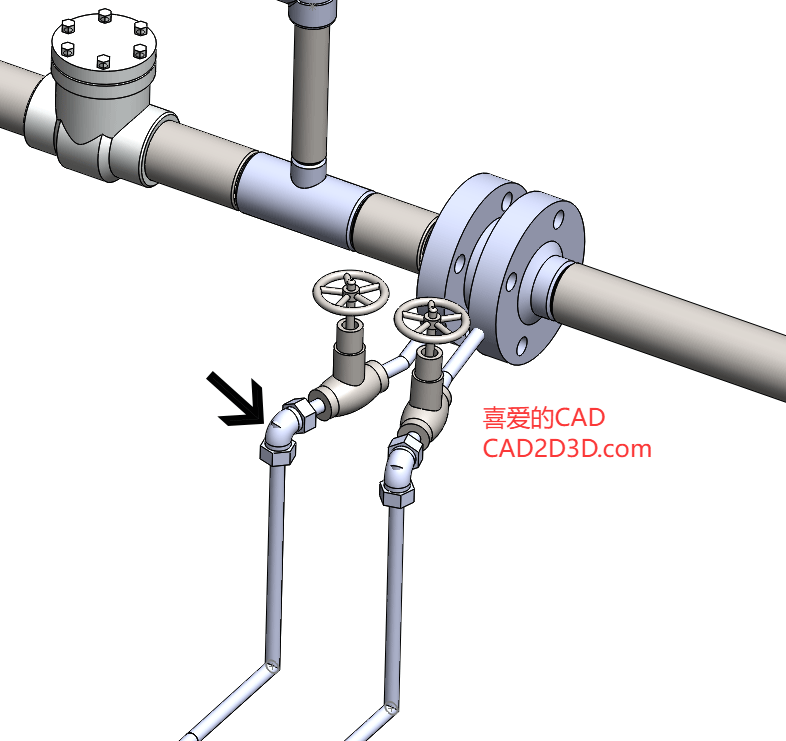
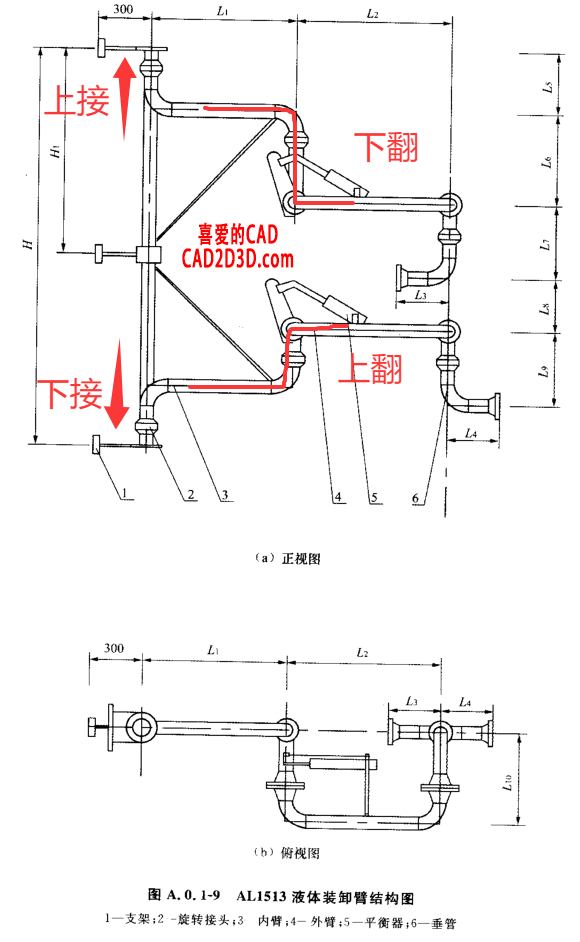 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载