
 API干式阀3D模型,SolidWorks源文件,API RP-1004标准
API干式阀3D模型,SolidWorks源文件,API RP-1004标准  CAD2D3D 官网服务器所有文件资源,3D模型、设计软件和案例视频等
CAD2D3D 官网服务器所有文件资源,3D模型、设计软件和案例视频等  谐波减速机3D模型SolidWorks源文件下载,含stp通用格式
谐波减速机3D模型SolidWorks源文件下载,含stp通用格式 视觉如果只是识别工件类别时,可以采用景深大的相机,可以满足工件高度差1米内的识别判断。
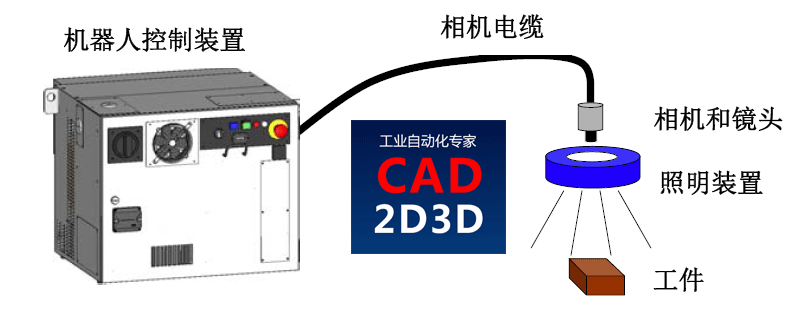
如果识别工件位置,不能采用上述方法,景深大会造成工件成像变形,影响位置判断。识别工件位置,工件最好处于相机焦距位置,工件高度差要小于5mm。
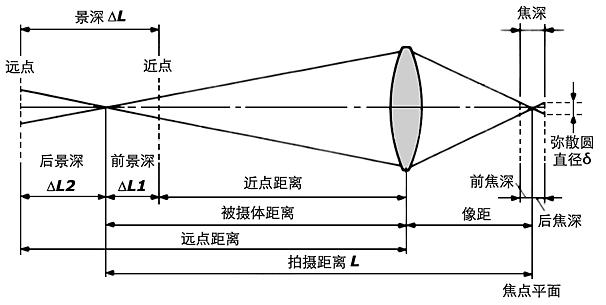
景深(DOF),是指在摄影机镜头或其他成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。光圈、镜头、及焦平面到拍摄物的距离是影响景深的重要因素。在聚焦完成后,焦点前后的范围内所呈现的清晰图像的距离,这一前一后的范围,便叫做景深。

简单的说,在被摄主体(对焦点)前后的影像,仍然有一段属于清晰范围内,可被准确地识别,这段清晰的可视范围就是景深。
景深越浅(背景模糊),景深越深(背景清晰)。
影响景深的3个因素:
(1)当焦距和光圈一定时,被拍摄物体距离镜头较远时,景深相对较大;被拍摄物体距离镜头较近时,景深相对较小。
如下图中所示,左边图小女孩与镜头较近,身后的背景看起来比较模糊;右侧图中小女孩与镜头相对较远,看起来身后背景较为清晰。

(2)镜头焦距的影响,当拍摄距离和光圈大小不变时,焦距越大景深越小。通常情况下,当我们使用广角镜头(短焦距)来拍摄一个物体时,我们会感觉前后景深较大,物体间的距离拉得很开;而如果在同一位置拍摄同一物体使用了远摄镜头(长焦距),我们会感觉画面中清晰的范围很小,画面有纵深方向被压缩的感觉,景深感觉相对较小。

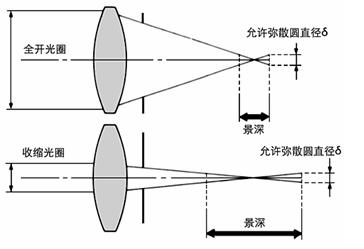
(3)光圈大小与景深的关系,对于固定焦距和固定拍摄距离的画面,当光圈开得越大,画面景深越小。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1313
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1313.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
- 破防了!美国国家标准不是强制性的,全凭企业自愿遵守,不怕没有底线的无良企业吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm- 一个日本小公司,注册资本只有17万元,凭什么可以做到全球第一?
- 长条孔泛滥,机械工程师无奈的选择,说到底还是被坑怕了
- 日本新款机器人J1轴机械限位器不见了,机械都被电气取代了
- 气动主轴和电主轴内部构造,精密高速主轴,带刀柄,可实现自动换刀
- 德国德马吉机床,机器人自动化上下料,最先进的自动化生产线
- 电磁波、激光、雷达和超声波测距有什么区别和联系?
- 工业上两种典型的除尘技术:油雾烟气净化和烟气粉尘净化技术
 圆柱形物料提升机 下料自动整理排列
圆柱形物料提升机 下料自动整理排列
更多最新发布: 工业相机视觉系统
-
视觉应用案例!采用HALCON组件模型匹配算法识别槽车法兰位置
-
FANUC iRVision 视觉学习——相机校准、视觉数据、用户坐标系和工具坐标系
-
 发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
发那科机器人(FANUC)视觉(iRVision)操作说明书pdf免费下载,详细介绍如何利用视觉实现机器人自动抓取工件
-
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像
-
发那科FANUC机器人视觉软件 iRVision 使用方法和步骤详述,相机设置、标定方法、视觉处理工具等各项参数含义解释
-
 工业相机视觉系统学习—彩色相机的效果和预处理
工业相机视觉系统学习—彩色相机的效果和预处理
-
三维视觉系统(3D视觉)的重复精度(±3σ)是什么意思,重复定位精度是如何计算出来的?
-
高温热态尺寸在线测量,3D视觉识别建模,锻造工件尺寸自动测量
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载