
 【官方正版新书】 大学生方程式赛车的设计与实践 张勇、林继铭、杨永柏、张锋、陆勇 清华大学出版社 方
【官方正版新书】 大学生方程式赛车的设计与实践 张勇、林继铭、杨永柏、张锋、陆勇 清华大学出版社 方
 官网正版 一本书看懂汽车设计 历史 概念与方法 托尼 卢因 时代特征 概念 方法 创意 风格 工程技
官网正版 一本书看懂汽车设计 历史 概念与方法 托尼 卢因 时代特征 概念 方法 创意 风格 工程技
 BOSCH汽车工程手册(中文第四版) 汽车基础理论知识 汽车设计研发 汽车结构与原理 汽车工程师从业
BOSCH汽车工程手册(中文第四版) 汽车基础理论知识 汽车设计研发 汽车结构与原理 汽车工程师从业
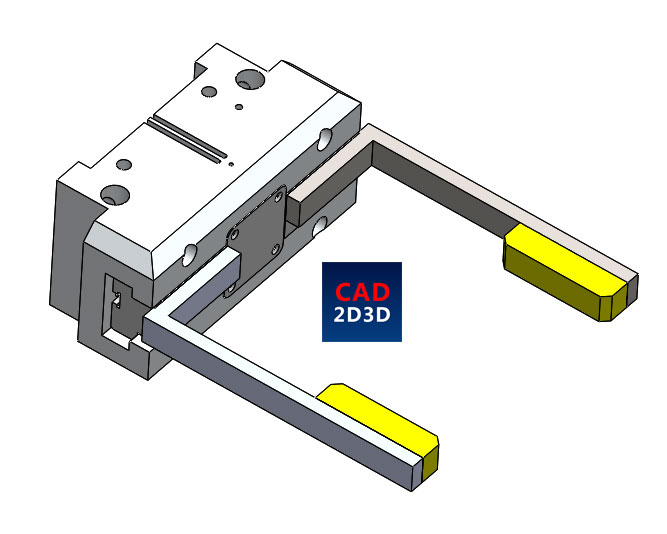
机器人手爪通常由气缸和手指组成,其中如何确定手指尺寸是关键,下面通过SolidWorks有限元分析和理论计算两种方式,分别验证手指是否满足材料力学性能和变形量的要求。
经过检验,两种方式的最终结果相差不大。
机器人手爪示意图:
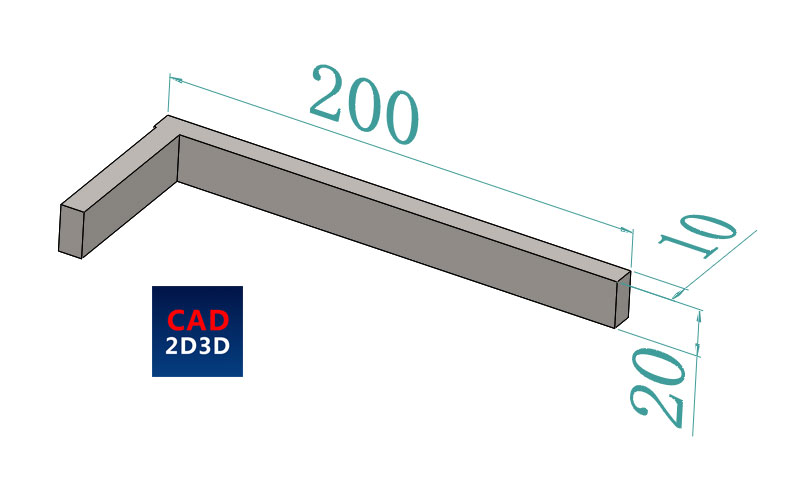
手指尺寸长200×宽20mm×高10mm,具体尺寸如下图:
1. SolidWorks有限元分析
1.1 有限元设置
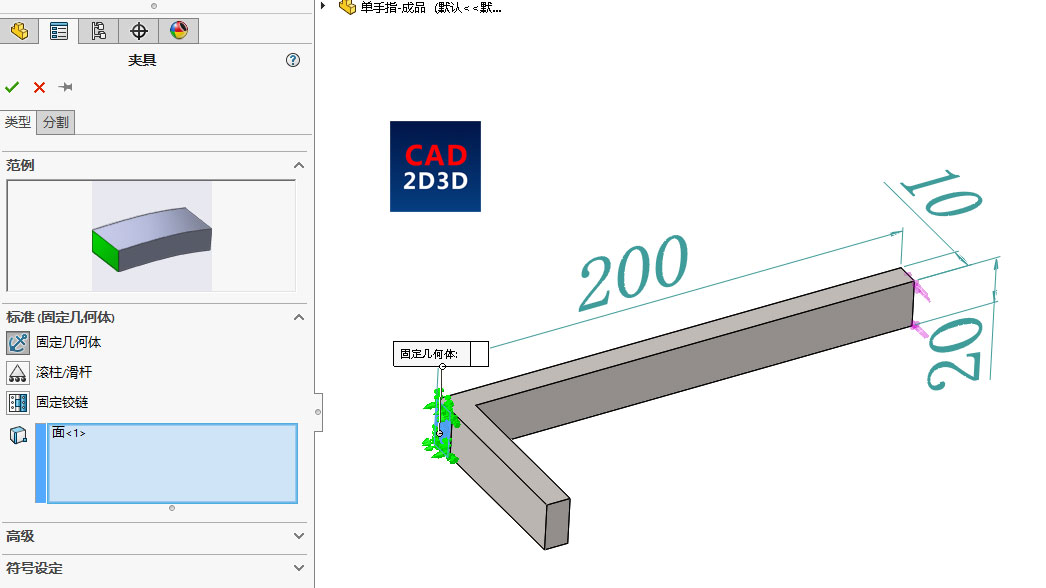
首先简化模型,我们只取手指来做受力分析,在SolidWorks有限元分析中,将夹具设置为固定几何体,选择手指端面即可,具体参见下图:
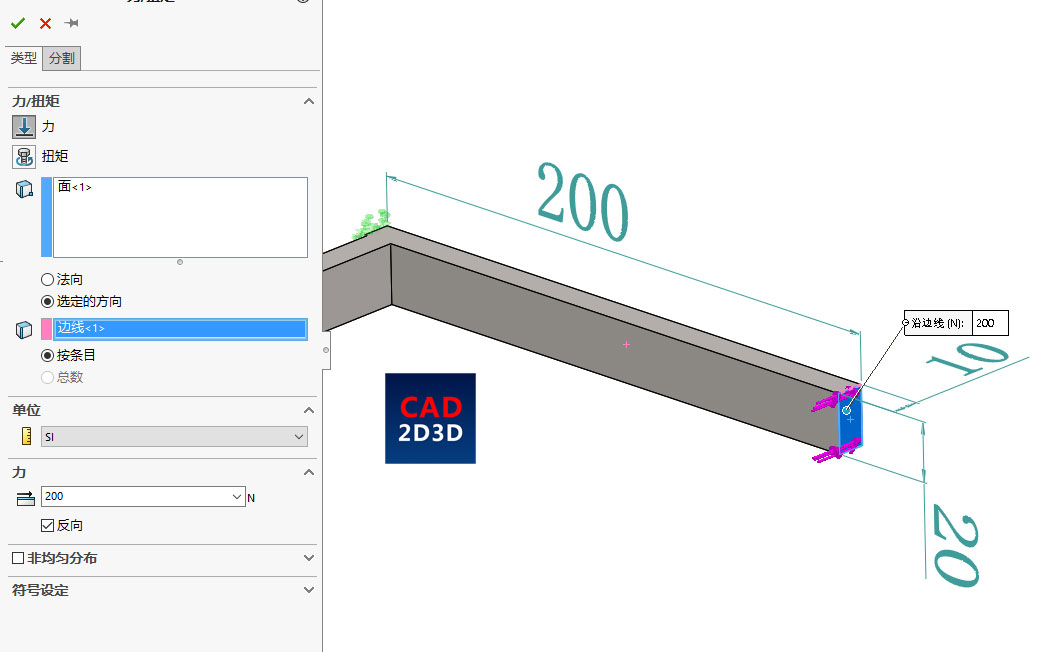
然后设置外部载荷,我们在手指另一端面设置200N的力,具体参见下图:
1.2 有限元分析结果:应力
划分网格并运行之后,应力应变结果如下:
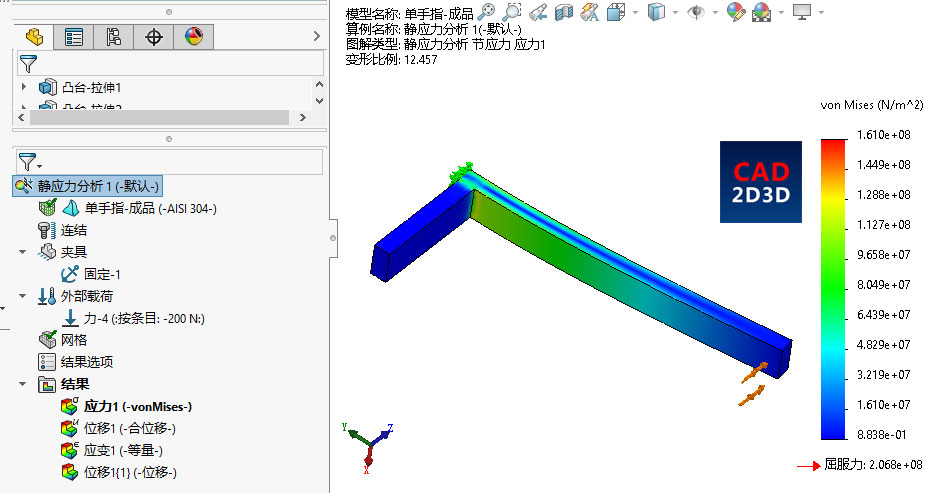
应力判定标准,手指应力不能超过材料的许用应力。这里特别强调一下,许用应力不是屈服强度,更不是抗拉强度,关于许用应力请参见 https://www.cad2d3d.com/post-1226.html
通过上图可知,某些区域的应力已经超过材料许用应力,这时候就需要对这些特定区域进行优化,比如增加圆角、增加厚度、更换材料等方式。
1.3 有限元分析结果:应变
通过SolidWorks有限元分析,可以直接得到应变结果,应变为1.6mm,具体如下图所示:
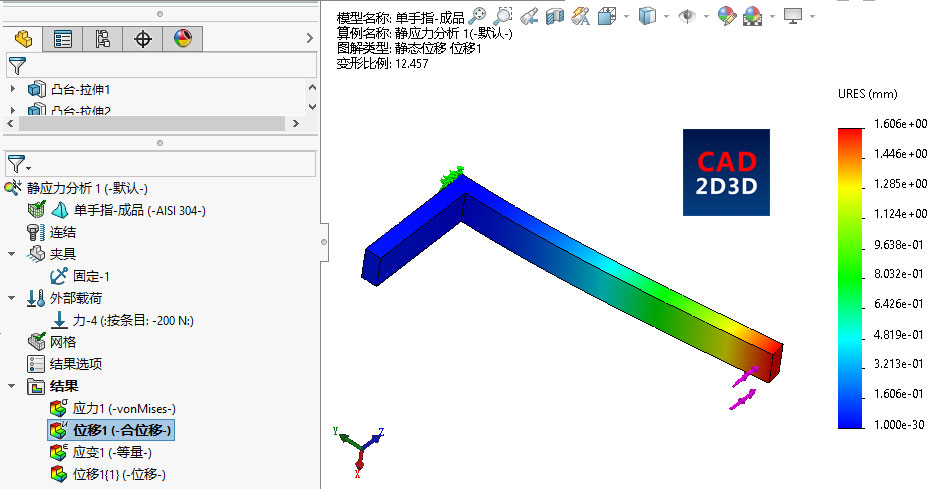
有限元分析不是准确的计算,其分析结果受你设置的限定条件约束,你限定的条件越准确,有限元分析结果越准确。
2. 理论计算
手指相当于一个悬臂梁,材料力学对悬臂梁的挠度有专门的计算公式。
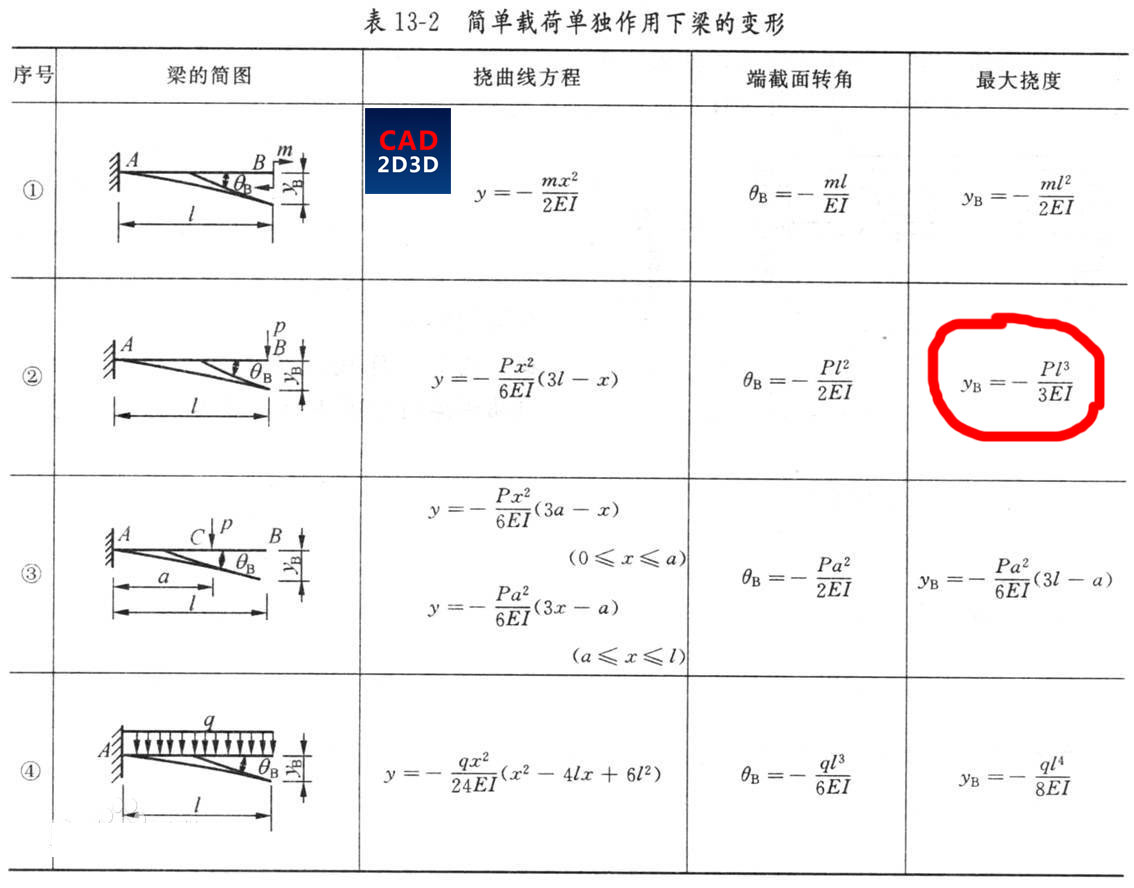
挠度计算公式:yB=-Pl3/3EI,其中E是材料的弹性模量,I是惯性矩,I=bh3/12。
材料选用304,E=1.9×1011pa,b=20mm,h=10mm,将上述数值带入挠度计算公式,经计算挠度yB=1.68mm,和有限元分析的应变1.6mm,相差不大。
通过上述分析可知,一个长200×宽20mm×高10mm的手指,给末端施加200N的力时,变形量为1.68mm。
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1331.html
留言说明:
如对本文有疑问,可关注微信公众号 科技大爆炸 从0到1 直接留言即可。手机扫描下方二维码直接关注 科技大爆炸 从0到1。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
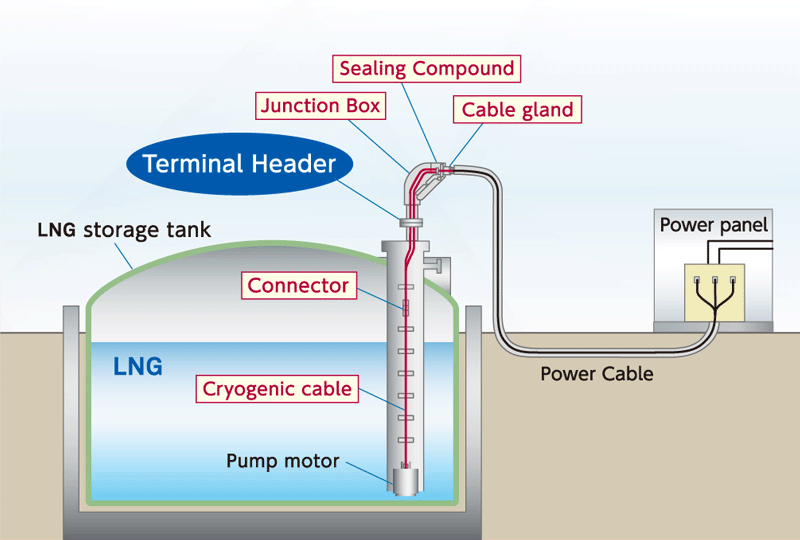 LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
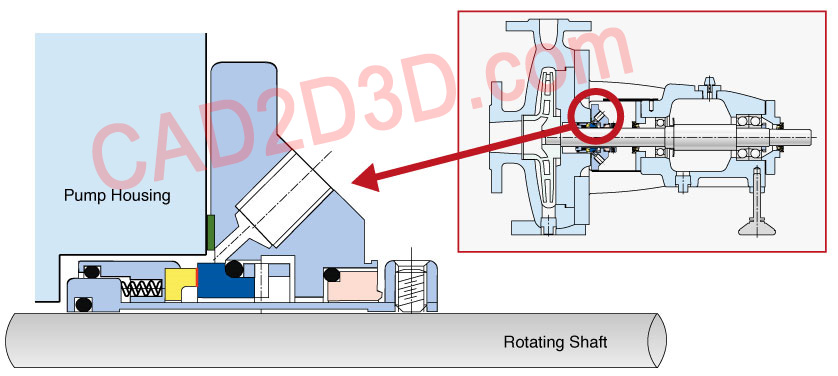 泵机械密封组成、内部构造和运行原理
泵机械密封组成、内部构造和运行原理
 减速机种类、特性及其优劣势
减速机种类、特性及其优劣势
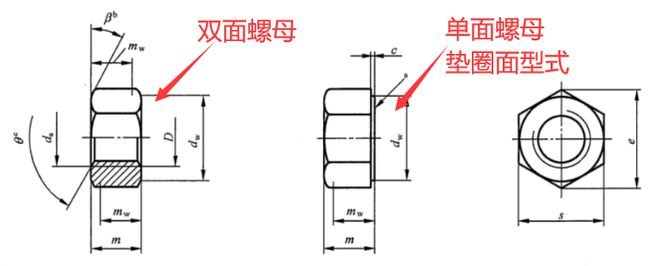 惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
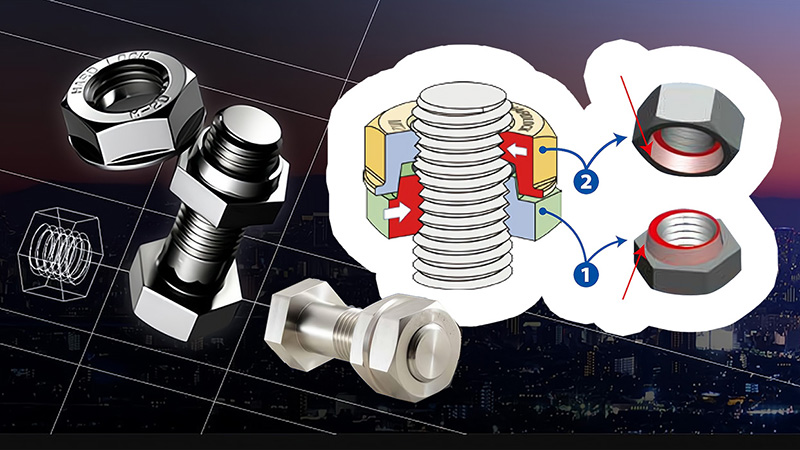 日本永不松动螺母构造和原理,价格是国内普通螺母42倍
日本永不松动螺母构造和原理,价格是国内普通螺母42倍
 看到这样的手爪设计,我隐约有点担心,机械设计切忌能用就行
看到这样的手爪设计,我隐约有点担心,机械设计切忌能用就行
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载