
与
日本经典系列丛书 相关商品:
查看所有与
日本经典系列丛书 相关商品 >>
 官网正版 电气一点通 日本经典技能系列丛书 电压 电流 电功率 电动机 半导体 开关 电线与接线 电
官网正版 电气一点通 日本经典技能系列丛书 电压 电流 电功率 电动机 半导体 开关 电线与接线 电  【新华正版】切削加工资料大全(升级版双色印刷)/日本经典技能系列丛书 (日本)刀具工程师编辑部 机械
【新华正版】切削加工资料大全(升级版双色印刷)/日本经典技能系列丛书 (日本)刀具工程师编辑部 机械  电气一点通/日本经典技能系列丛书
电气一点通/日本经典技能系列丛书 德国的机器人手爪,都设计成摆动式的,从他们的设计图中可以看出,摆动式的手爪可以更好的与工件表面接触,国产手爪和国外就差这一点点,但是这一点点就是质变。

由于存在平面度、圆度等偏差,工件表面不可能是理想形状,因此按理想状态下设计的手爪,抓工件都抓的不牢靠,虽然现场反复调试,最终也能实现抓取,但并不能根除问题。

工业机器人系统集成项目中,最重要的就是机器人手爪设计了,手爪不出大问题,机器人单元基本上不会出问题,比如机器人锻造项目,由于工件存在拔模斜度,机器人手爪必须根据拔模斜度做针对性设计,否则锻件就抓不起来,手爪能不能成功,最后都在这些细节设计方面。
输入暗号阅读全文
暗号:
暗号错误,请重试!
暗号获取方式
关注本站官方微信公众号 喜爱的CAD,私信回复
暗号1321
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post- 1321 .html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
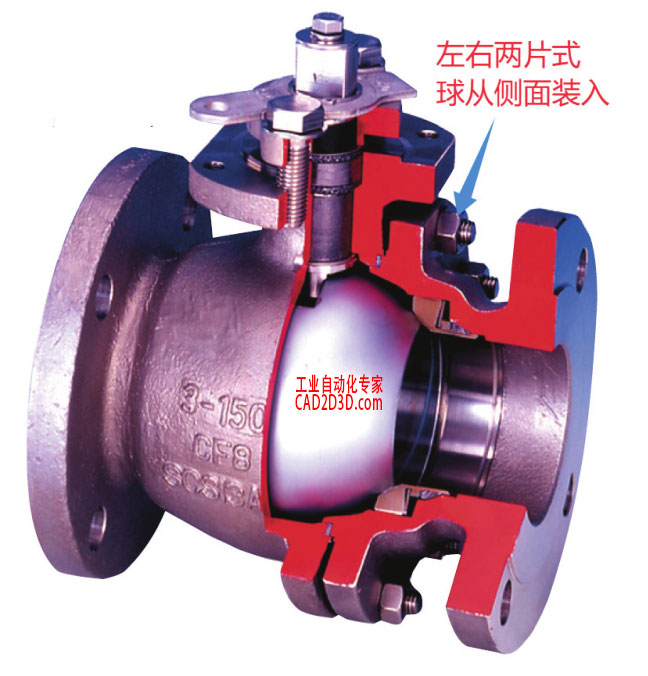 装车橇设计大师:球阀(顶装和侧装、软密封和硬密封、浮动球和固定球、单向密封和双向密封)
装车橇设计大师:球阀(顶装和侧装、软密封和硬密封、浮动球和固定球、单向密封和双向密封)- 日本不二(福集莱泰庫斯)公司官网,专注缓冲器、医疗器械等
- 暗藏玄机,FANUC机器人负荷计算分析表详解,原来好多内容都被隐藏了,附文件保护破解密码
- 什么是混凝土强度等级,设备安装对基础的混凝土强度有何要求?
- 环形拖链,机器人旋转环形拖链
- 手把手教你,如何使用发那科 FANUC iRVision 2D视觉实现位置随机连杆的准确抓取
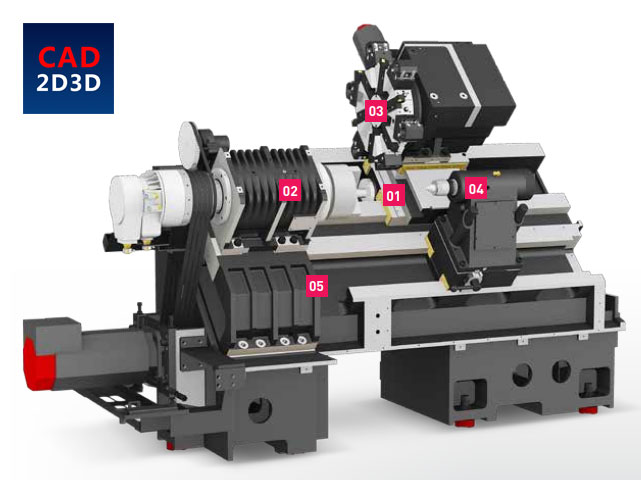 车床主轴夹紧工件的方法和原理,回转拉紧油缸和动力卡盘缺一不可
车床主轴夹紧工件的方法和原理,回转拉紧油缸和动力卡盘缺一不可- 低端制造业,强行上信息化,不但没有提高效率,反而让工人疲惫不堪
- 空气消耗量/所要空气量(流量)计算软件
- 大型重载工件翻转机,5吨以上负载
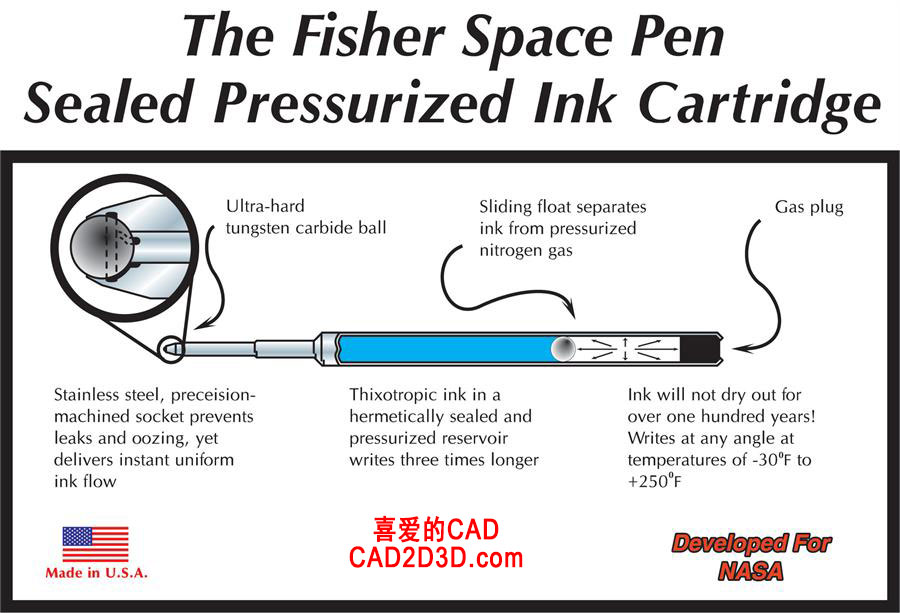 一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
一支太空笔,美国吹了半个世纪,当我看到太空笔内部构造和原理之后,我呵呵一笑,原来这么简单
 塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
塞焊缝、槽焊缝是什么样子的?塞焊缝、槽焊缝示意图、符号、3D示意图和实物图展示
 油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
油漆也能实现导线绝缘?电机转子就是这么干的,认知又一次被颠覆
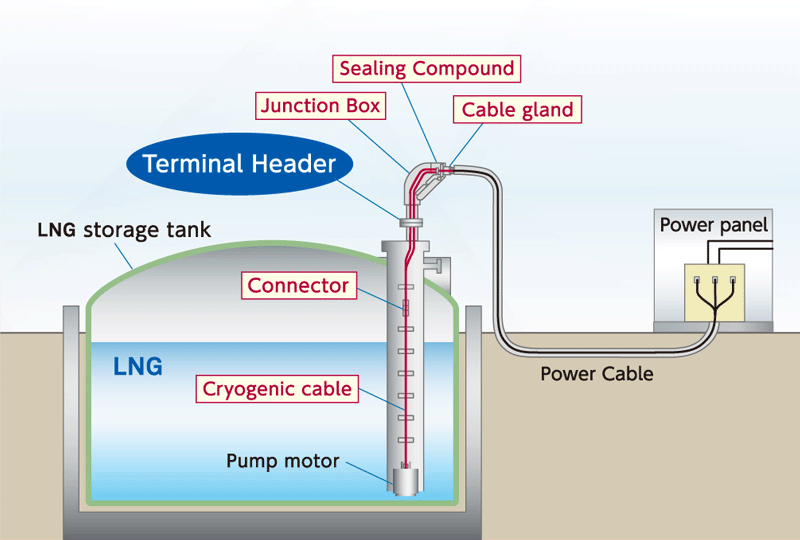 LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
LNG罐内泵电气终端接头(接线端子)内部构造、绝缘和密封
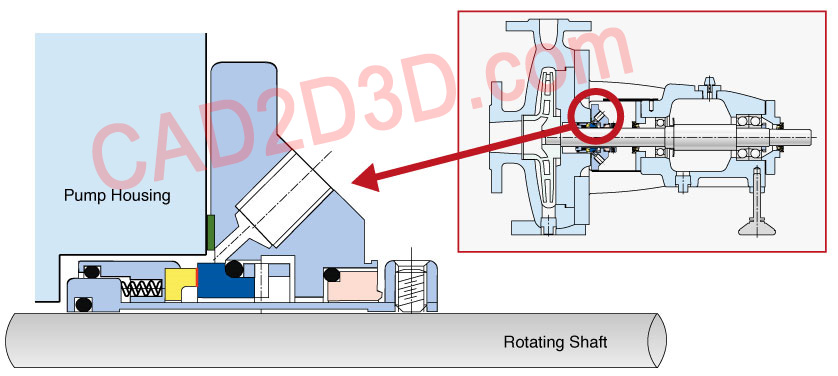 泵机械密封组成、内部构造和运行原理
泵机械密封组成、内部构造和运行原理
 减速机种类、特性及其优劣势
减速机种类、特性及其优劣势
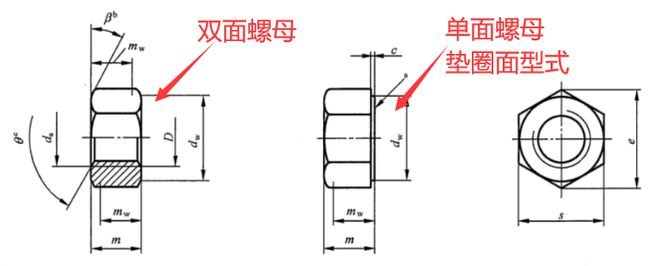 惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
惊呆了!印度工程师居然说我们的螺母装反了,螺母还分正反面?
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载