
 行星摆线针轮减速机带电机齿轮箱变速箱常州减速机三项卧式立式铜
行星摆线针轮减速机带电机齿轮箱变速箱常州减速机三项卧式立式铜  普斯bwd摆线针轮减速机三相380v搅拌起重XWD齿铜芯低速电动机马达
普斯bwd摆线针轮减速机三相380v搅拌起重XWD齿铜芯低速电动机马达  新0宝减速机谐波VB-18R-3-K3-38L3A8
新0宝减速机谐波VB-18R-3-K3-38L3A8 为了方便机器人选型,日本FANUC公司提供了一个机器人负荷计算分析表,填入负载重量、重心位置、绕重心的转动惯量,就可以自动计算出J4/J5/J6三个轴的扭矩和转动惯量。
FANUC机器人负荷计算分析表下载地址:https://www.cad2d3d.com/post-604.html
机器人负荷计算分析表的用户界面如下图所示:
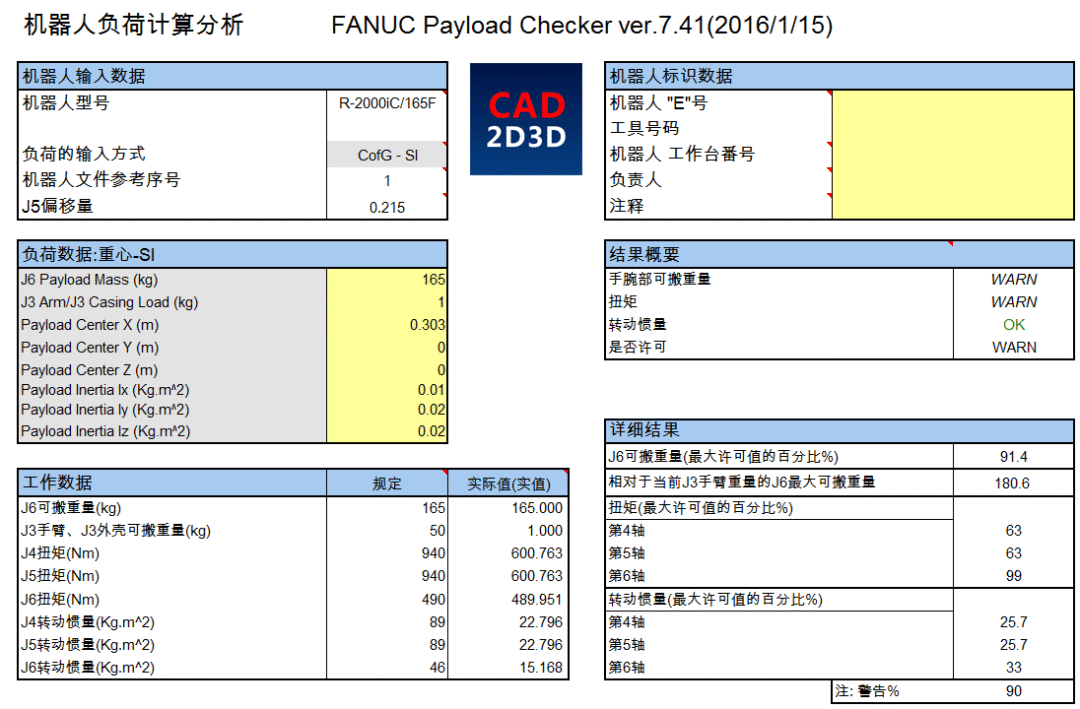
这个界面很简洁,用起来也很方便,但是只给出了扭矩、转动惯量以及是否可用,而内在的计算过程、公式、逻辑关系等都被隐藏了,为防止别人偷看,日本FANUC公司把整个工作簿都被保护起来。
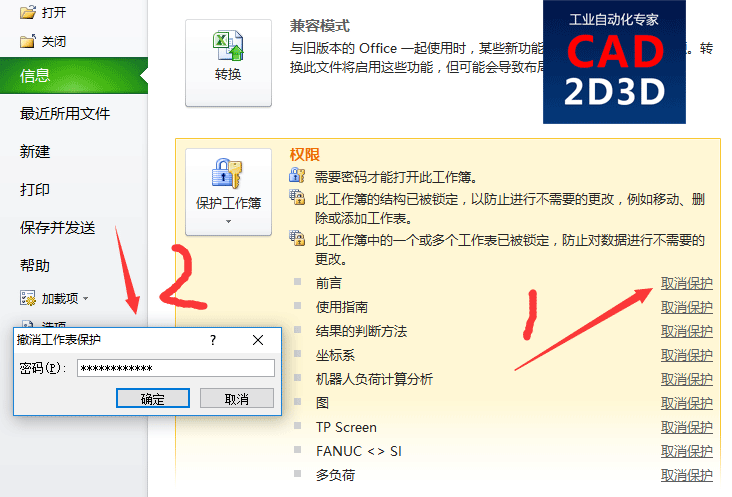
为了研究这个表格,我费了好大劲才搞到取消保护的密码,感兴趣的朋友,可以在公众号CAD2D3D的主页回复关键字 FANUC密码 自动获取。
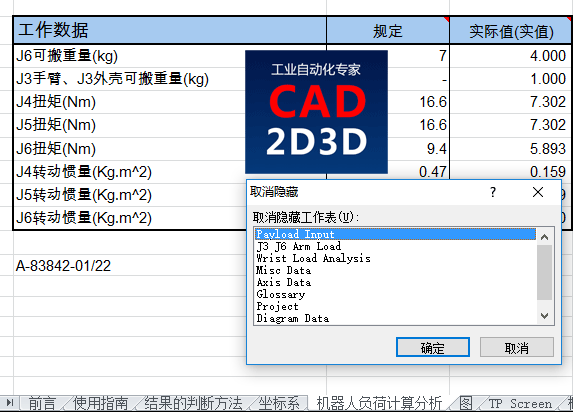
输入密码,取消 保护工作簿 及 里面的各个表格,在底部的页面选项卡上点击右键,选择 取消隐藏,就会弹出如下所示的对话框,有9个页面被日本FANUC公司隐藏了,其中 Payload Input 这个页面就有具体的计算公式。
文章未完,完整内容请参见:https://mp.weixin.qq.com/s/3FkaZUbxhnAX7eOmSSkHuA
微信扫描下方二维码直接浏览:

未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1642
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1642.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
- 标准中的 必须、严禁、应、不应、不得、宜、不宜、可 的用词说明
- 液化石油气供应工程设计规范 GB 51142 重点条款 摘抄学习,流速可取0.8m/s~1.4m/s,管道与设备、阀门等可采用法兰连接或螺纹连接
- 文件夹被病毒隐藏,无法显示,在命令行直接通过attrib命令更改显示属性
 日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮
日本螺钉生产现场,没想到这么落后,但成品质量让人眼前一亮- LNG装车撬电气仪表设备上面的防爆标志 ExdIIBT4 ( Ex d IIB T4 )代表什么含义?
- 气缸与导轨滑块连接方式,采用浮动接头结构,避免活塞杆受额外负载
- M10的螺钉保证载荷3.37吨,做设计不能靠经验,理论计算之后心里更有底
 机加工豪克能刀具 实现镜面加工及材料改性 全新表面处理方法
机加工豪克能刀具 实现镜面加工及材料改性 全新表面处理方法 防油防潮耐高温轴流风机 管道安装式 浇注铸造除尘除气
防油防潮耐高温轴流风机 管道安装式 浇注铸造除尘除气 电路板电子零部件(电阻、电容、USB、网口、SD卡槽、接插件等)三维模型SolidWorks源文件免费下载
电路板电子零部件(电阻、电容、USB、网口、SD卡槽、接插件等)三维模型SolidWorks源文件免费下载
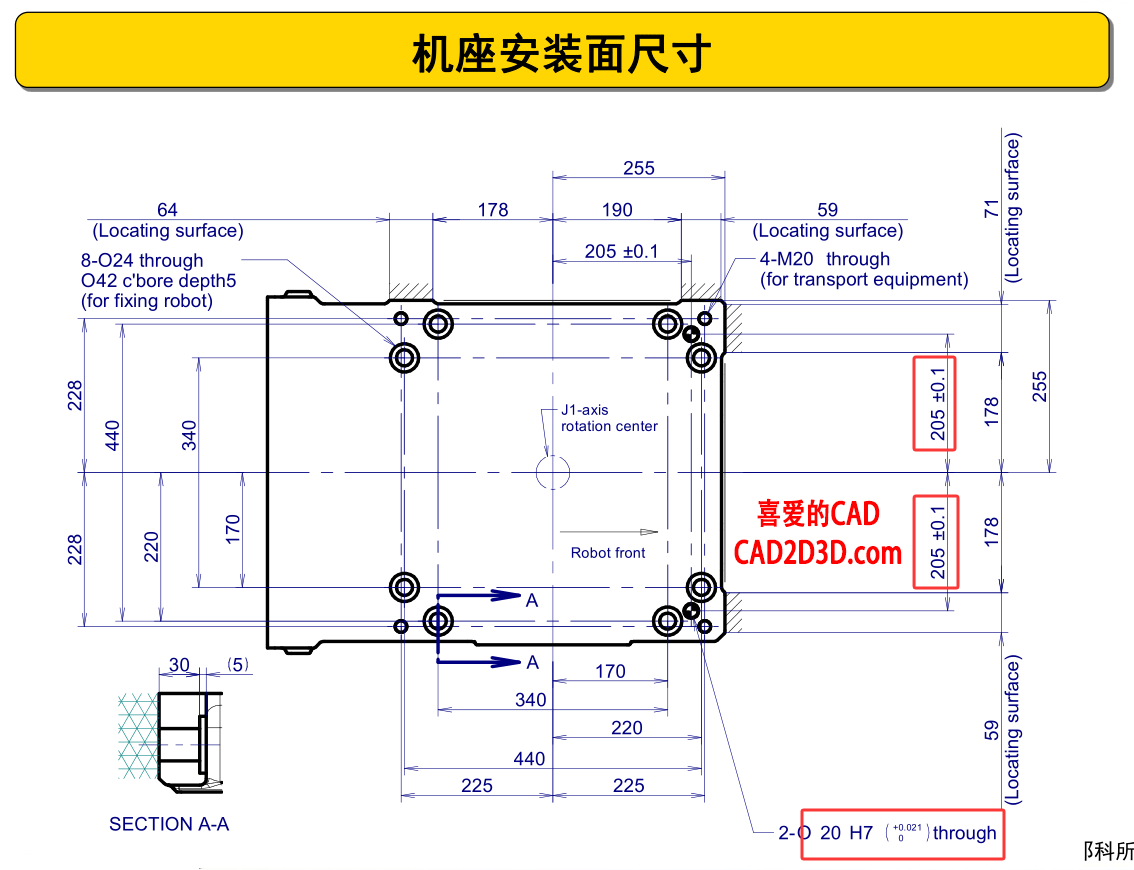 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载