蜗轮付摆动运动机构
蜗轮 付 摆 动 运动 机 构
| ra-ssee
3-72
动力 : 囊 气 . .
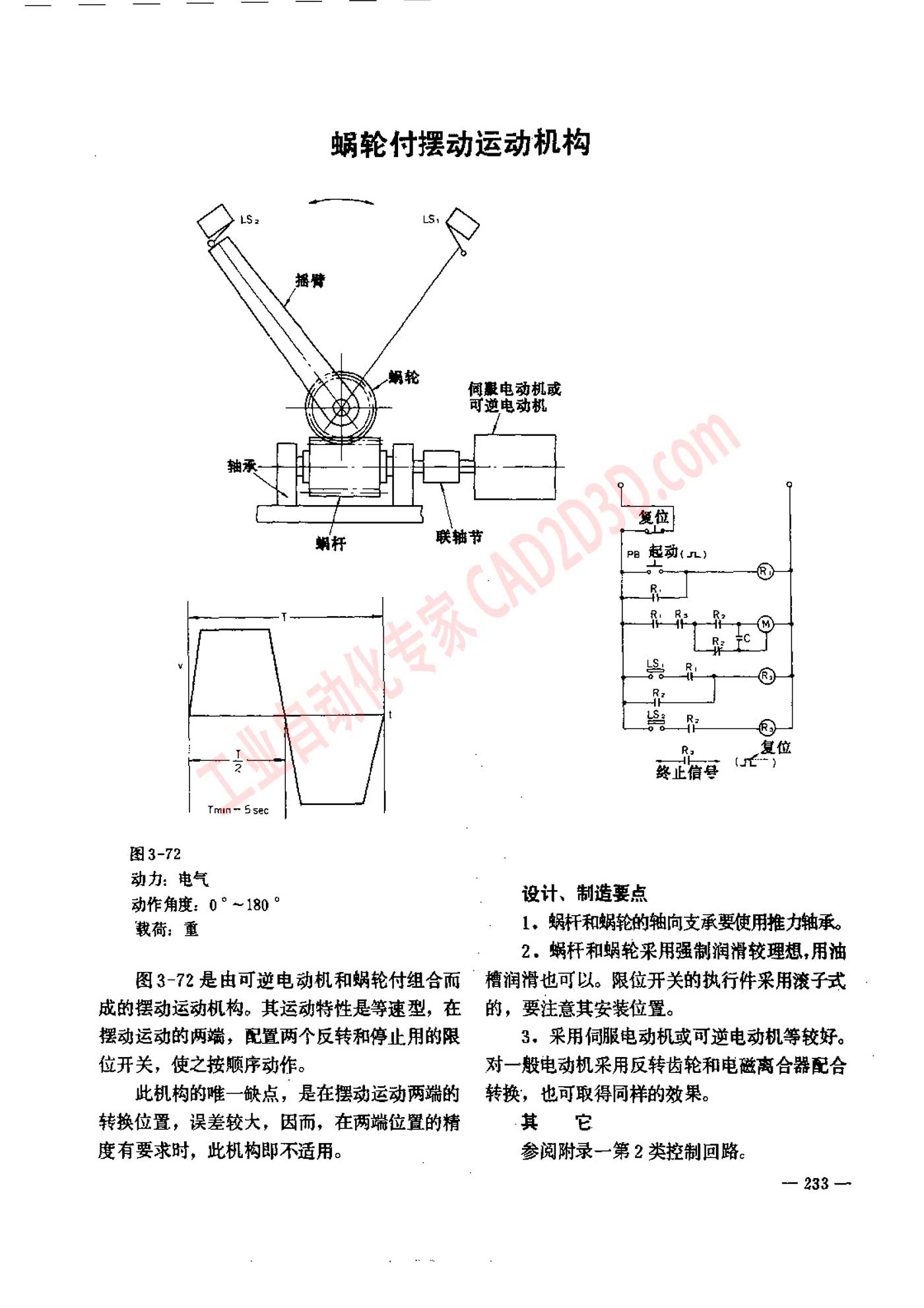
B 0°~180° 设计 、 制 造 要 点
载荷 重 L. 蝇 杆 和 蜗轮 的 轴 向 支承 要 使 用 推力 钠 承 。
2 。 蝇 杆 和 蜗轮 采用 强制 润 请 较 理想 ,用 油
图 3-72 是 由 可 逆 电 动机 和 蜗轮 付 组 合 而 “ 模 润 滑 也 可 以 。 跟 位 开关 的 执行 件 采用 液 子 式
成 的 摆动 运动 机 构 。 其 运动 特性 是 等 速 型 , 在 的, 要 注意 其 安装 位 置 。
摆动 运动 的 两 端 , 配 置 两 个 反 转 和 停止 用 的 限 3。 采 用 伺 腿 电动 机 或 可 逆 电 动机 等 较 好 。
位 开关 , 使 之 按 帆 序 动作 。 对 一 般 电 动机 采用 反 转 齿轮 和 电磁 离合 器 配合
此 机 构 的 唯一 侧 点 , 是 在 摆动 运动 两 端的 。 转换 , 也 可 取得 同样 的 效果 。
转换 位 置 , 误 差 较 大 , 因 而 , 在 两 端 位 置 的 精 其 它
度 有 要 求 时 , 此 机 构 即 不 适用 。 参阅 附录 一 第 2 类 控制 回路 。
一 2333 一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)