蜗杆摆动运动机构
蜗杆 摆动 运动 机 构
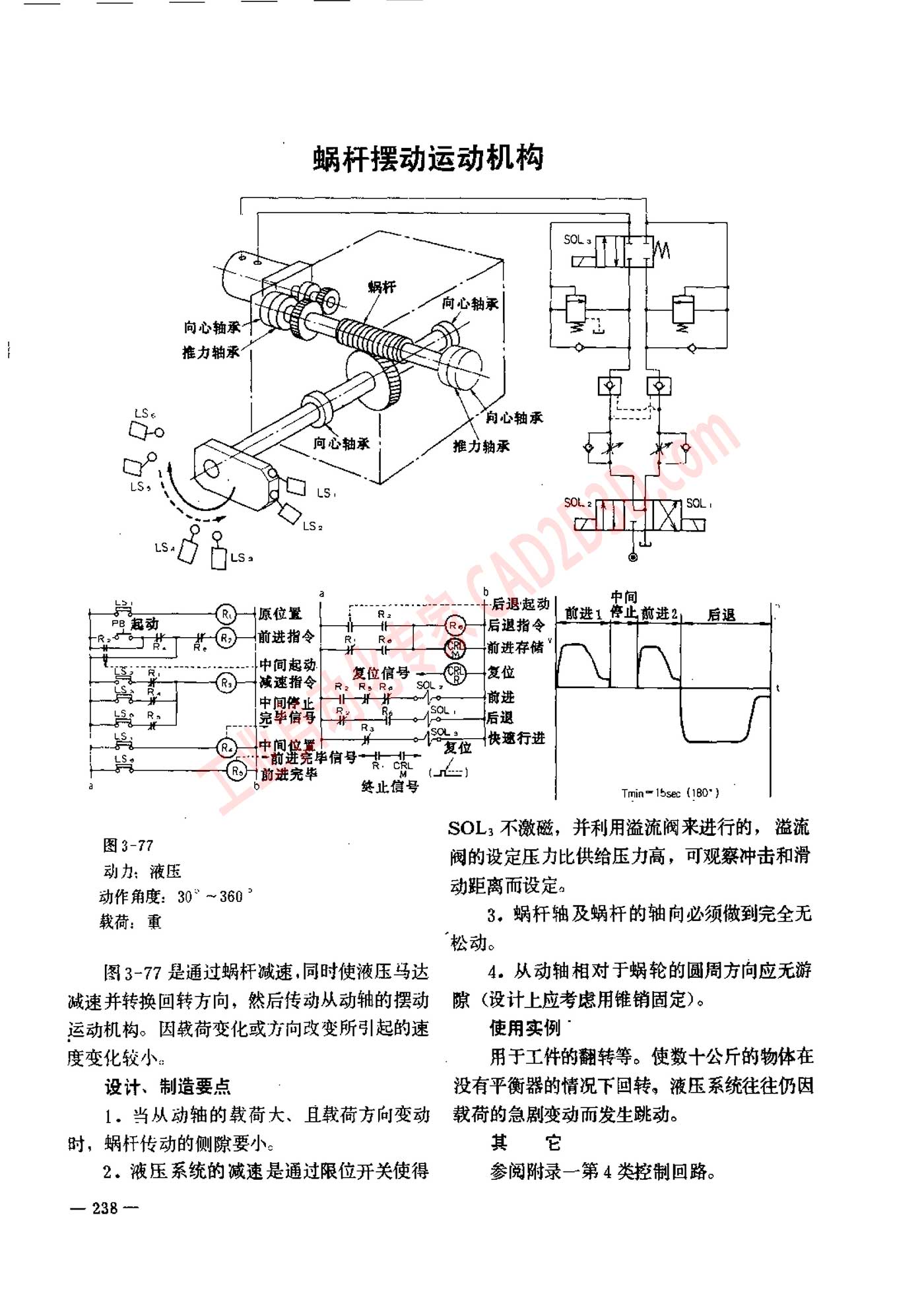
图 3-77
动力 液压
动作 角度 : 30” ~360 ”
载荷 : 重
图 3-77 是 通过 蜗杆 减速 ,同时 使 液压 马达
减速 并 转换 回转 方向 , 然 后 传动 从 动 轴 的 摆动
运动 机 构 。 因 载荷 变化 或 方向 改变 所 引起 的 速
度 变 化 较 小 。
设计 、 制 造 要 点
1. 当 从 动 轴 的 载荷 大 、 且 载荷 方向 变动
针 , 蜗 杆 传动 的 侧 除 要 小 。
2. 液压 系统 的 减速 是 通过 限 位 开关 使 得
一 238 一
Tmin= 15sec (180")
SOL; ANigRs, ) AR RETH, WK
闪 的 设 定 压力 比 供给 压力 高 , 可 观察 冲击 和 滑
动 距离 而 设 定 。
3, 蜗杆 轴 及 蜗杆 的 轴 向 必须 做 到 完全 无
松动 。
4。 从 动 轴 相 对 于 蜗轮 的 圆周 方向 应 无 洲
隙 《设计 上 应 考虑 用 锥 销 固 定 )。
使 用 实例
町 于 工件 的 翻转 等 。 使 数 十 公斤 的 物体 在
没有 平衡 器 的 情况 下 回转 。 液 压 系统 往往 仍 因
载荷 的 急剧 变动 而 发 生 跳动 。
其 它
参阅 附录 一 第 4 类 控制 回路 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)