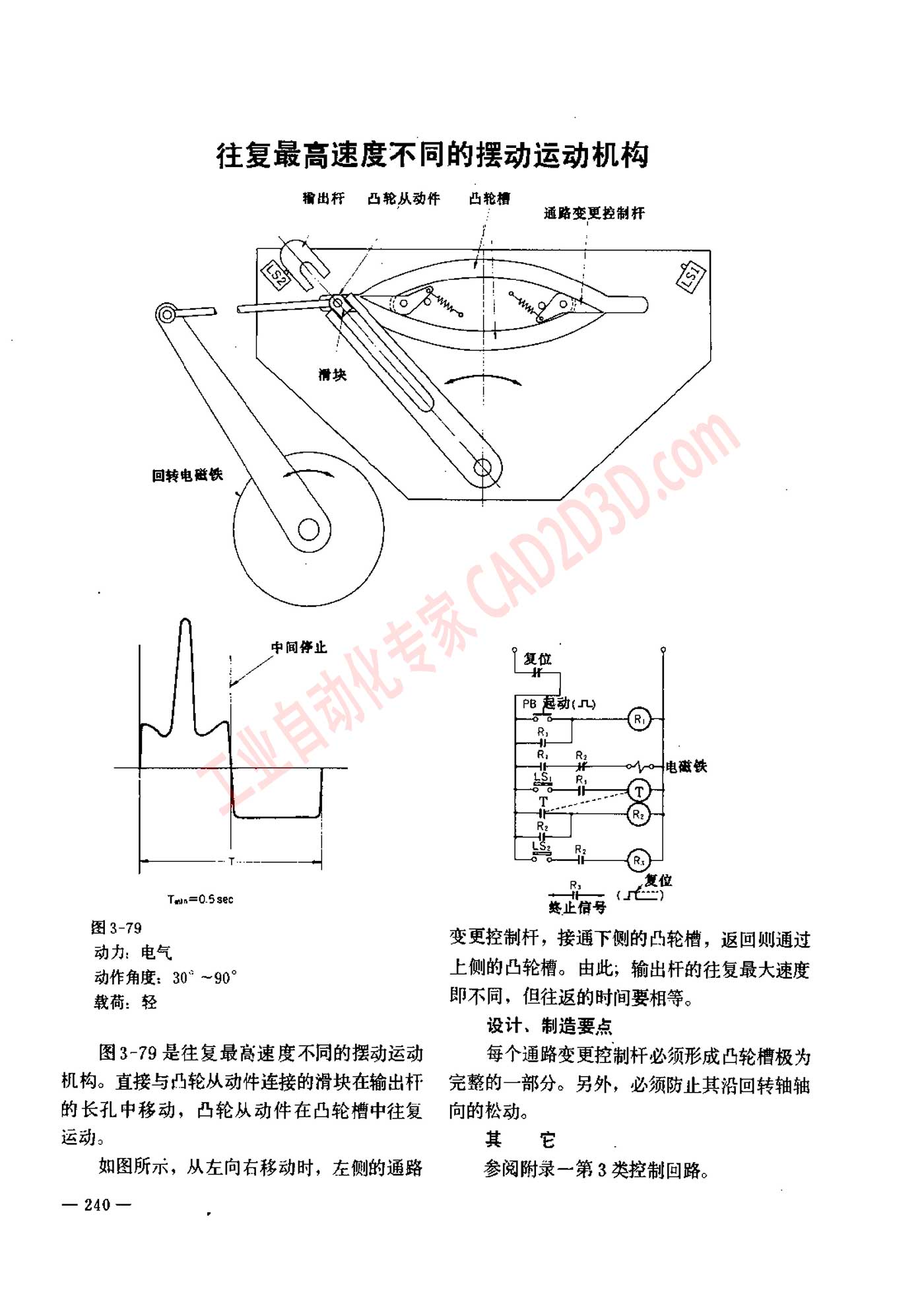
往复最高速度不同的摆动运动机构
往复 最 高 速度 不 同 的 摆动 运动 机 构
狂 出 行 ”本 轮 从 动 件 ”凸轮 模
通路 变更 控制 杆
am
Tmn=0.5sec
ek i 变更 控制 杆 , 接 通 下 侧 的 凸轮 恒 , 返 回 则 通过
SR, 805 40" P s SRR SR A
w2 即 不 同 , 但 往返 的 时 间 要 相等
设计 、 制 造 要 点
3-79 是 往复 最 高 速度 不 同 的 摆动 运动 每 个 通路 变更 控制 杆 必 须 形 成 凸轮 槽 极为
机 构 。 直 接 与 凹 轮 从 动 件 连接 的 滑 块 在 输出 杆 。 完整 的 一 部 分 。 另 外 , 必 须 防 止 其 滑 回转 轴 轴
的 长 孔 中 移动 , 西 轮 从 动 件 在 凸轮 模 中 往复 ”向 的 松动 。
运动 。 其 它
如 图 所 示 , 从 左 向 右 移动 时 , 左 侧 的 通路 参阅 附录 一 第 3 类 控制 回路 。
一 240 一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)