
与
工业机器人 相关商品:
查看所有与
工业机器人 相关商品 >>
 二手工业机器人 18kg 4轴 三菱机械手 本体
二手工业机器人 18kg 4轴 三菱机械手 本体  工业机器人 机械手 本体
工业机器人 机械手 本体  安川机械手 工业机器人 机器人本体 MOTOMAN HP20 20公斤
安川机械手 工业机器人 机器人本体 MOTOMAN HP20 20公斤 1.5 工业机器人的节拍计算
影响机器人的节拍因素很多,比如自身各轴速度、加速度、运动距离、点位停止精度等。
比如FANUC M-20iA机器人,在搬运路径25→300→25→25→300→25、负载质量20kg时的循环时间为0.78s。

图9机器人动作节拍
机器人编程时,直线运动时,速度参数可以输入2000mm/s,但考虑到电机加减速后,实际运行时间会增加。
常用的FANUC R-2000iC/165F机器人,行走2m的距离时,用时大约3s,小机器人会快一些,大机器人会慢一些,如果想得到一个相对准确的时间,可以在FANUC ROBOGUIDE仿真软件里模拟行走一下,但FANUC官方也不保证ROBOGUIDE软件的准确性,都是参考值。
气缸活塞的速度可达1000m/s,但由于使用了调速阀,实际运行时速度会慢很多,气缸开合一次的时间一般约定为2s。
因此机器人从A点抓取工件,行走到B点,然后松开工件,预计用时7s。
深度阅读:
- 机器人速度/节拍分析:https://www.cad2d3d.com/post-960.html
未完待续
更多精彩内容请参见完整版教材。
《工业机器人系统集成自动化生产线方案设计大师》教材获取方法:
关注微信公众号 CAD2D3D,回复 方案大师 获取本教材
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1529.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 学艺不精!被运算优先级搞晕了!先算三角函数还是先算乘除啊?
学艺不精!被运算优先级搞晕了!先算三角函数还是先算乘除啊?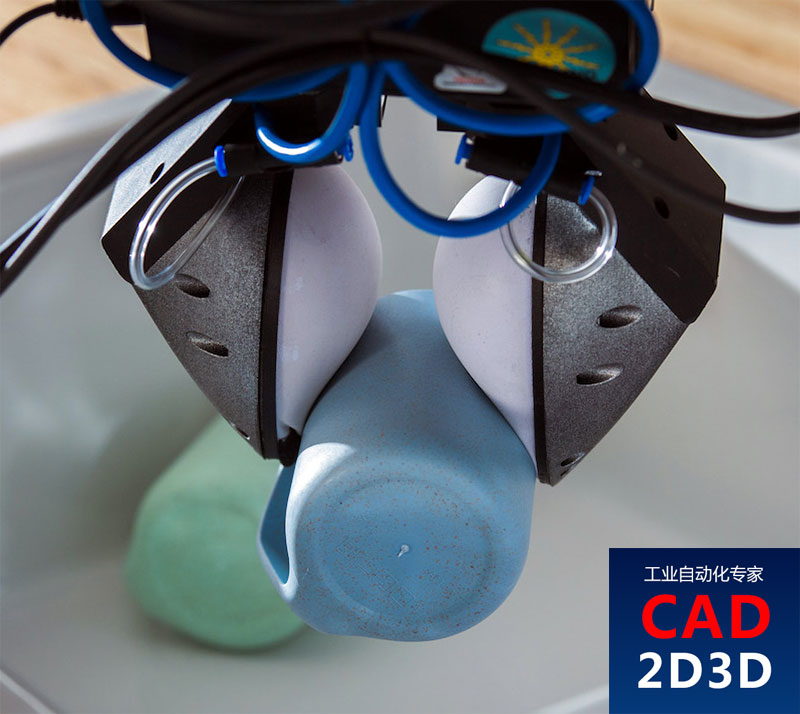 柔软的气泡式手爪,自动感知物体形状和夹持力,实现从杂乱无章的物品中准确抓取和放置
柔软的气泡式手爪,自动感知物体形状和夹持力,实现从杂乱无章的物品中准确抓取和放置 地脚螺栓分类(固定、活动、胀锚、粘接)和使用安装方法
地脚螺栓分类(固定、活动、胀锚、粘接)和使用安装方法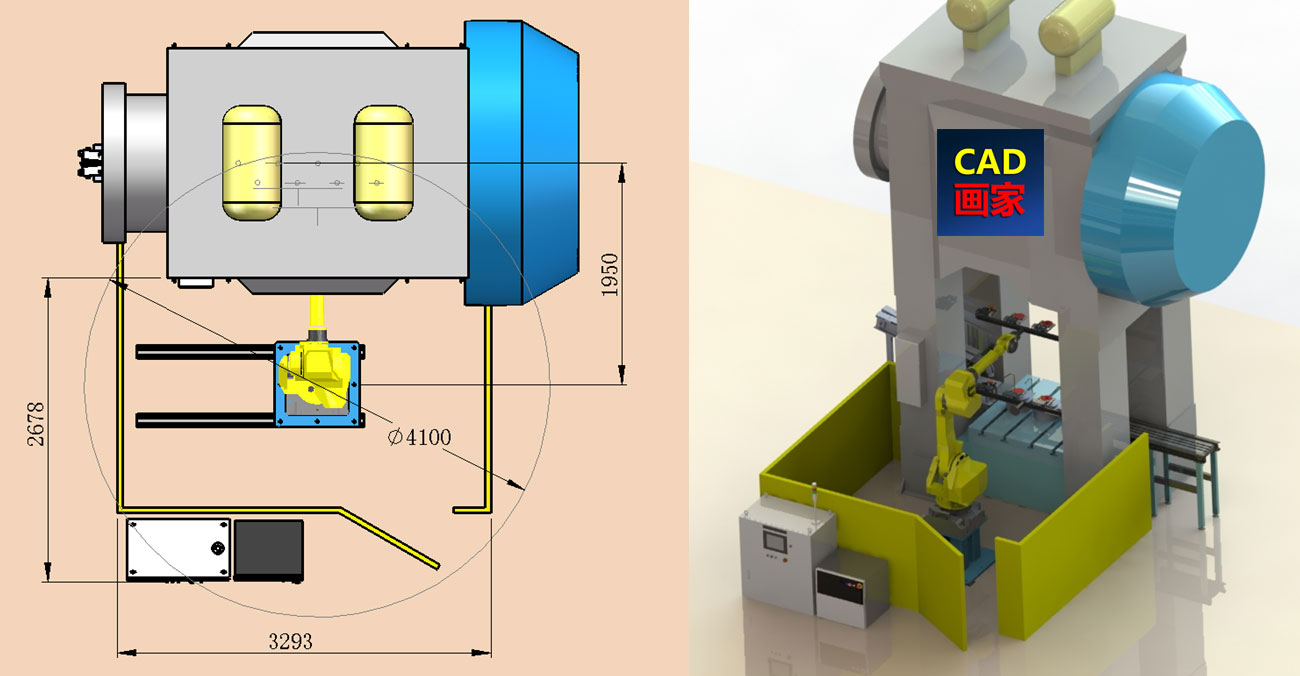 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载