
与
工业机器人 相关商品:
查看所有与
工业机器人 相关商品 >>
 景行AGV工厂工业智能搬运配送物机器人高效灵活精准AMR搬运小车
景行AGV工厂工业智能搬运配送物机器人高效灵活精准AMR搬运小车  工业AGV工厂车间智能搬运配送物机器人AMR无轨导航智能配送物小车
工业AGV工厂车间智能搬运配送物机器人AMR无轨导航智能配送物小车  智能扫地机器人工业工厂酒店车间商用全自动清洁机器人
智能扫地机器人工业工厂酒店车间商用全自动清洁机器人 1.4 工业机器人的选型方法
工业机器人选型就是根据实际工件和使用要求来确定机器人的具体型号。
首先,根据工件的形状和重量,设计机器人的手爪,然后计算手爪+工件的总重量、重心位置、相对于机器人法兰盘TCP点并且对齐TCP坐标系的转动惯量,可以通过三维软件(SolidWorks)自动计算上述参数值。
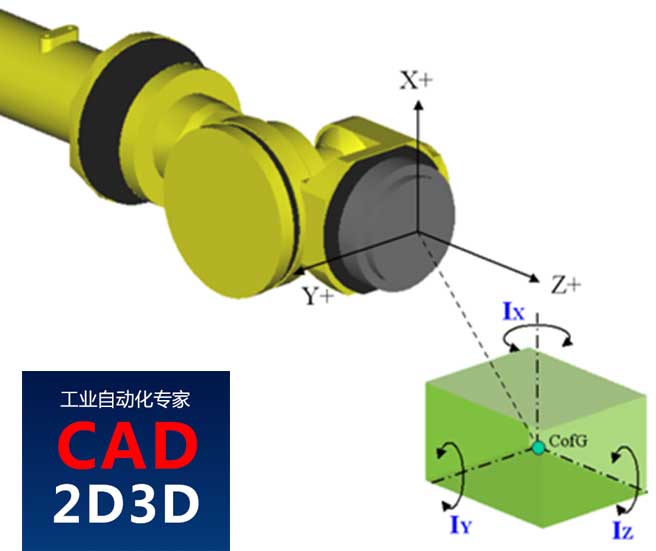
图7机器人负载重心及转动惯量
然后,根据手爪+工件的总重量,初步选择一款机器人,找到机器人手腕部允许负载曲线图,根据手爪+工件的重心位置(XYZ三个方向)相对机器人法兰盘TCP的距离,判断手爪+工件的重量是否在机器人允许负载范围内。
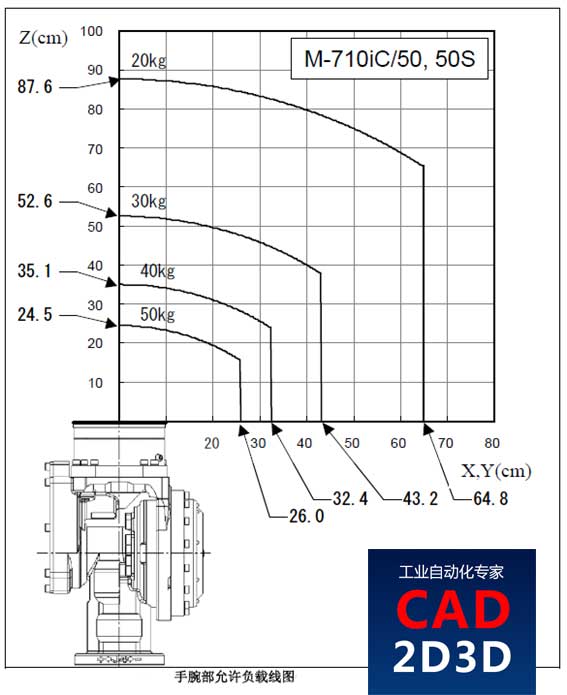
图8机器人手腕部负载曲线图
除了机器人手腕部允许负载曲线图之外,机器人厂家通常还会提供一个机器人负载校验工具,输入手爪+工件的重量、重心位置、转动惯量之后会自动计算出4、5、6三轴扭矩和转动惯量,并给出判定结果。
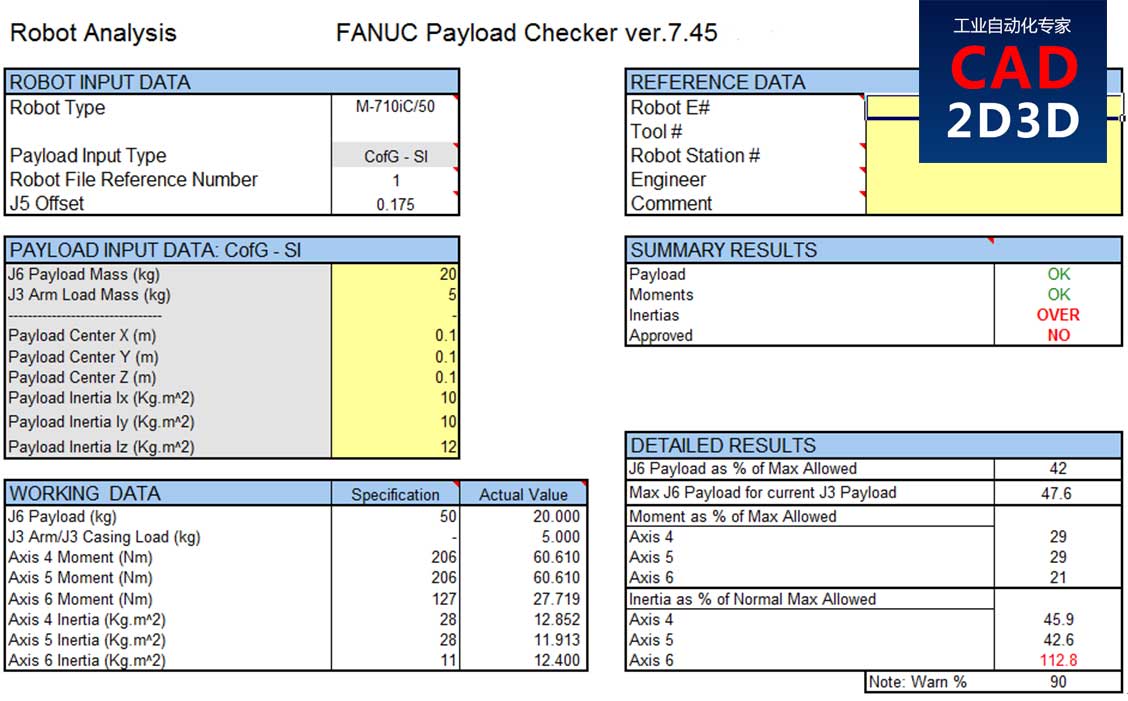
表2 机器人校核表‘’
最后,根据机器人使用要求,选择机器人的防护等级,在铸造、锻压、打磨等恶劣环境下使用时,需要选用IP67的机器人,在常规的机加工环境下选用标准版即可。
另外还需要根据行业应用选择对应的专用机器人,比如喷涂、码垛、焊接等。
深度阅读:
- KUKA机器人选型确认书:https://www.cad2d3d.com/post-1471.html
- KUKA机器人校核软件:https://www.cad2d3d.com/post-1129.html
- FANUC机器人校核表:https://www.cad2d3d.com/post-604.html
未完待续
更多精彩内容请参见完整版教材。
《工业机器人系统集成自动化生产线方案设计大师》教材获取方法:
关注微信公众号 CAD2D3D,回复 方案大师 获取本教材
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1528.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




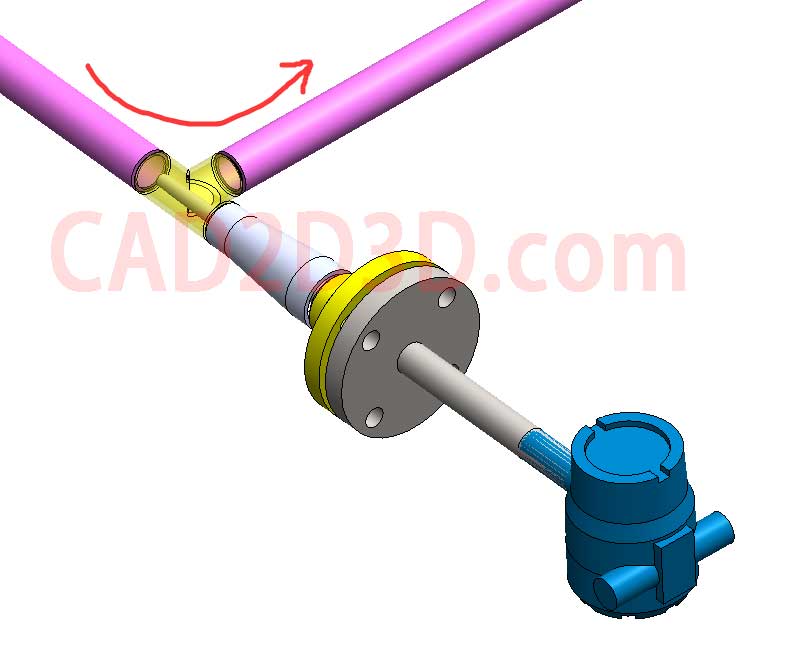 管道热电阻(热电偶)安装方法,温度变送器安装位置,一图胜过千言万语
管道热电阻(热电偶)安装方法,温度变送器安装位置,一图胜过千言万语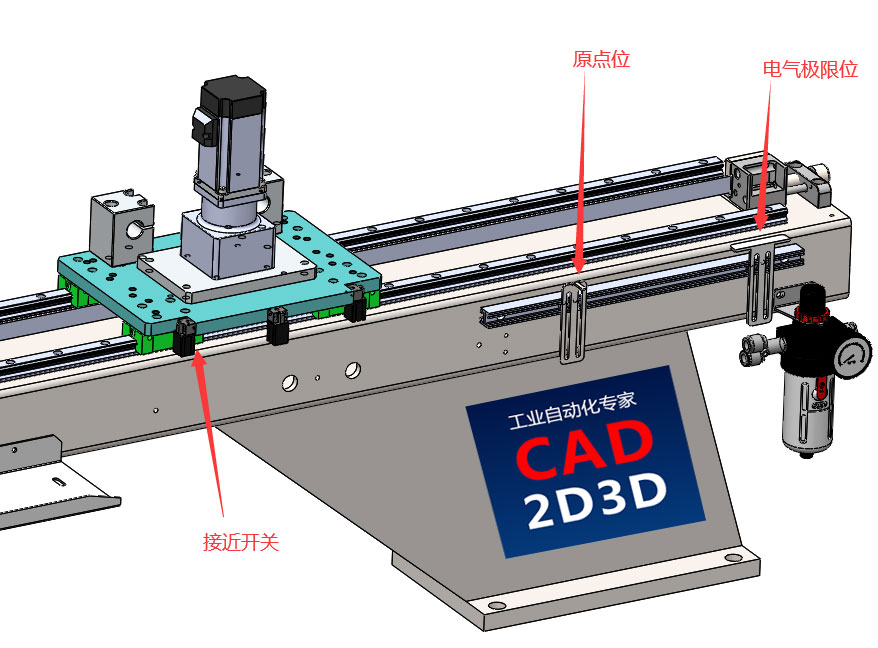 机械手每次启动后为什么要回原点,而工业机器人就不用?
机械手每次启动后为什么要回原点,而工业机器人就不用? 大行程旋转夹紧定心三爪,相比普通三爪,夹持范围更大
大行程旋转夹紧定心三爪,相比普通三爪,夹持范围更大 仓壁振动器(料仓下料用)种类及用途
仓壁振动器(料仓下料用)种类及用途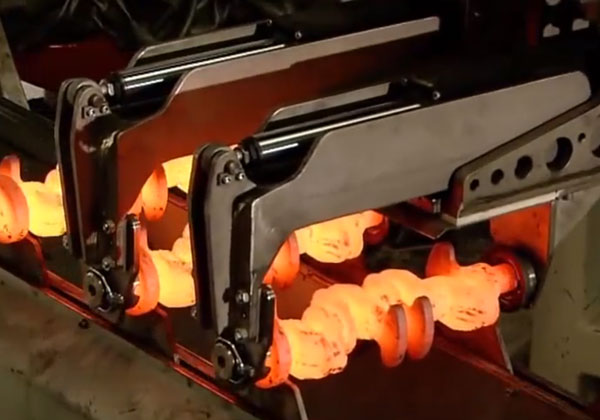 发动机曲轴全自动锻造生产线
发动机曲轴全自动锻造生产线 可口可乐超级工厂
可口可乐超级工厂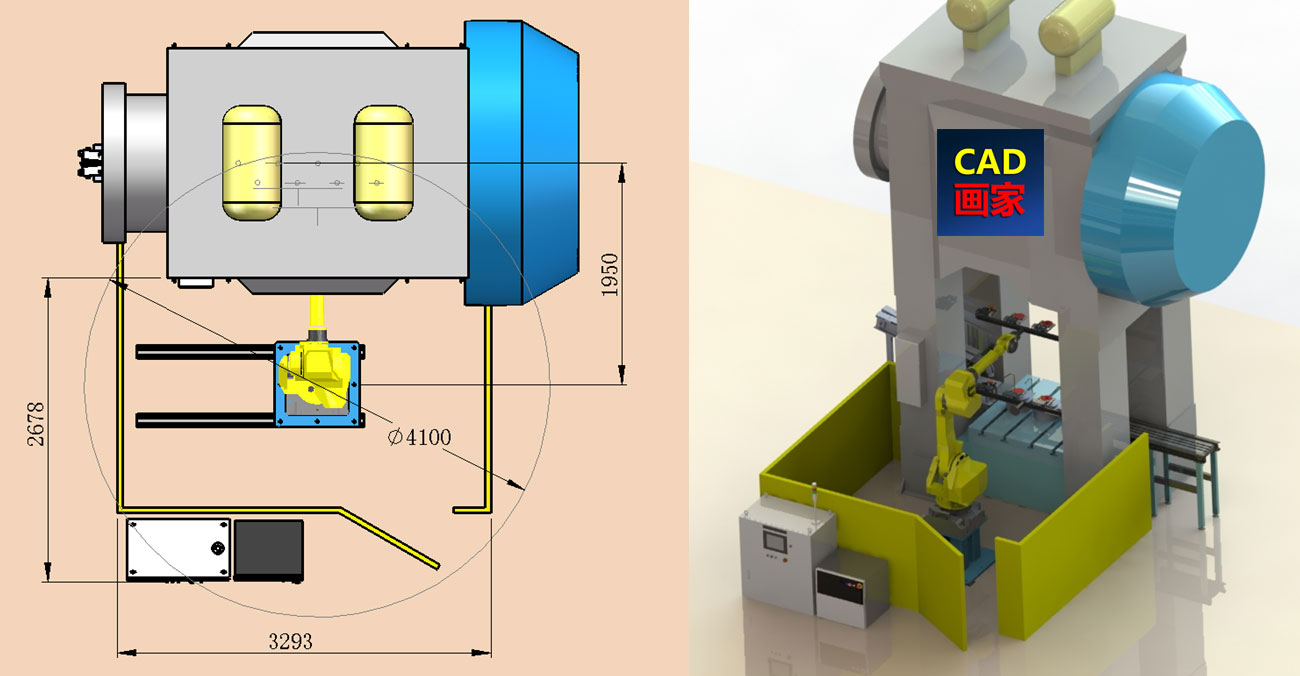 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载