
 伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM
伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM  伺服切割机器人六轴自由度机械臂爪工业手臂焊接喷涂冲压送料码垛
伺服切割机器人六轴自由度机械臂爪工业手臂焊接喷涂冲压送料码垛  伯朗特机器人工业六轴通用0805应用于头盔涂装流水线上料机械手臂
伯朗特机器人工业六轴通用0805应用于头盔涂装流水线上料机械手臂 1.6.1 软浮动功能 Soft Float
应用于工件夹取和机器人机床上、下料步骤。
软浮动功能在开启后,机器人可以受外力改变姿态,具体力矩可以通过参数设置。手爪在抓取工件时,顶针将工件顶起,手爪可跟随工件移动方向,改变姿态和工件一起移动,且机器人在力矩增加到设定值时,可及时停止,避免硬性碰撞和摩擦。
机器人将给设备上下料时,很难保证工件与设备上的工装夹具完全对准,可能导致工件与设备相互干涉,机器人开启软浮动后,工件可以依靠工装夹具自动微调姿态,避免干涉碰撞。
此外,在液压挤出装置上需要同步取出工件而同步速度不稳定时,以及毛坯粗加工上料时,软浮动功能也同样十分有效。
深度阅读:
- 机器人软浮动功能使用方法详解:https://www.cad2d3d.com/post-788.html
- 机器人软浮动,解决取放件时位置偏差:https://www.cad2d3d.com/post-1343.html
- 机器人软浮动,跟随外力,实现准确取放件:https://www.cad2d3d.com/post-1354.html
1.6.2 链速追踪功能 Line Track
线性追踪也就是我们经常听到的链速追踪,主要用来处理移动工件的取放,将运动物体的速度和方向发送给机器人,机器人控制器经过算法处理后,使机器人移动速度和运动物体相同,从而保证机器人和运动物体之间相对静止,最终实现准确的取放件。
![]()
图10链速追踪 Line Track
深度阅读:
- 机器人 Line Tracking 线性追踪详解:https://www.cad2d3d.com/post-1362.html
- 机器人线性追踪仿真视频:https://mp.weixin.qq.com/s/qd3ECwwX-6e1mK9Avjnurw
1.6.3 视觉引导 iRvision
视觉分2D视觉和3D视觉。
2D视觉就是先通过相机对工件拍照获取工件图片,然后通过各种算法对图像进行处理,最终获取图像中工件的有无、位置、尺寸等信息,另外还可以通过2D视觉实现字符识别、二维码读取等功能。

图11 2D视觉
3D视觉分双目视觉、结构光视觉和线激光扫描。
双目视觉类似人的两个眼睛,在汽车无人驾驶领域使用的较多。
结构光视觉是由投影仪投射结构光(条纹光)照射到工件表面,然后相机对工件表面的结构光进行拍照,从而获取工件表面轮廓点云数据。
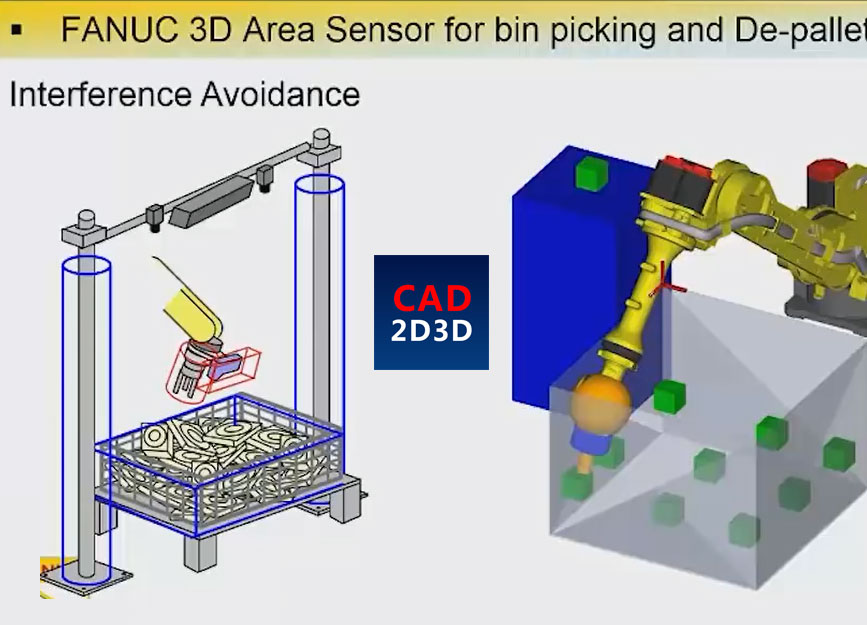
图12 3D视觉
深度阅读:
- FANUCiRvision视觉详解:https://www.cad2d3d.com/post-1442.html
- 连杆视觉定位取件仿真模拟:https://www.cad2d3d.com/post-1469.html
- FANUC AREA 3D视觉介绍:https://www.cad2d3d.com/post-1329.html
- FANUC 3DV视觉介绍:https://www.cad2d3d.com/post-1293.html
- 相机景深参数详解:https://www.cad2d3d.com/post-1313.html
未完待续
更多精彩内容请参见完整版教材。
《工业机器人系统集成自动化生产线方案设计大师》教材获取方法:
关注微信公众号 CAD2D3D,回复 方案大师 获取本教材
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1530
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1530.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 紧急切断阀的概念、适用范围和选型条件
紧急切断阀的概念、适用范围和选型条件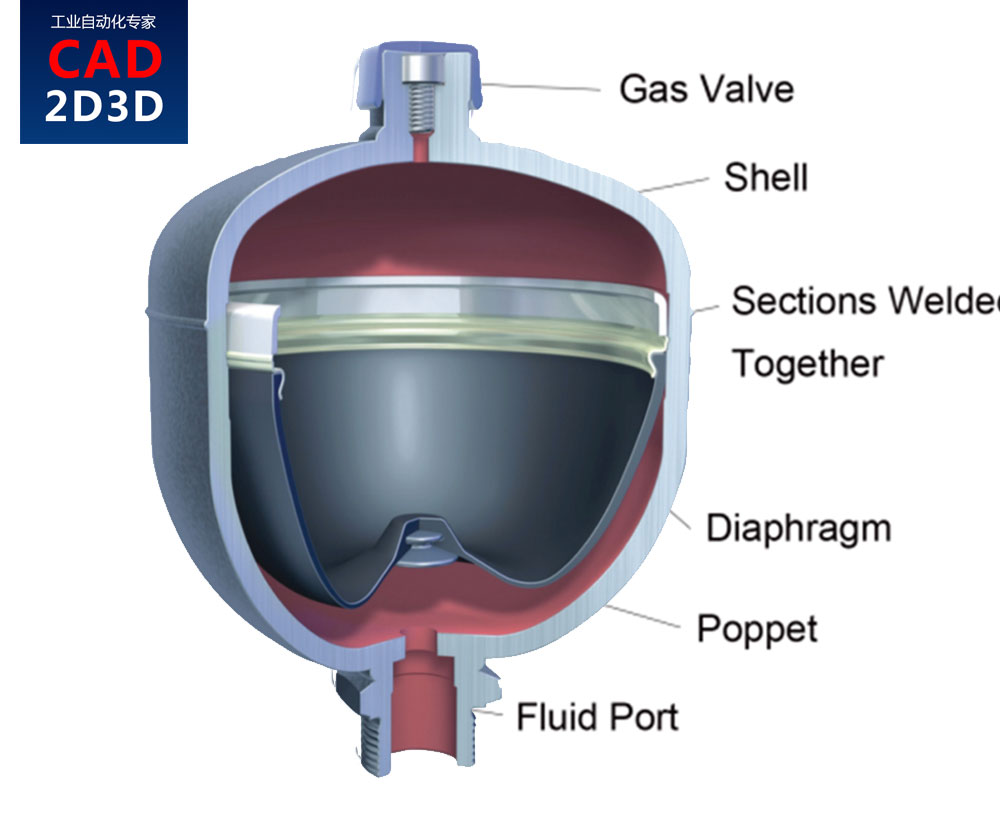 蓄能器内部构造和运行原理
蓄能器内部构造和运行原理 工业相机视觉检测的基础知识:相机光源
工业相机视觉检测的基础知识:相机光源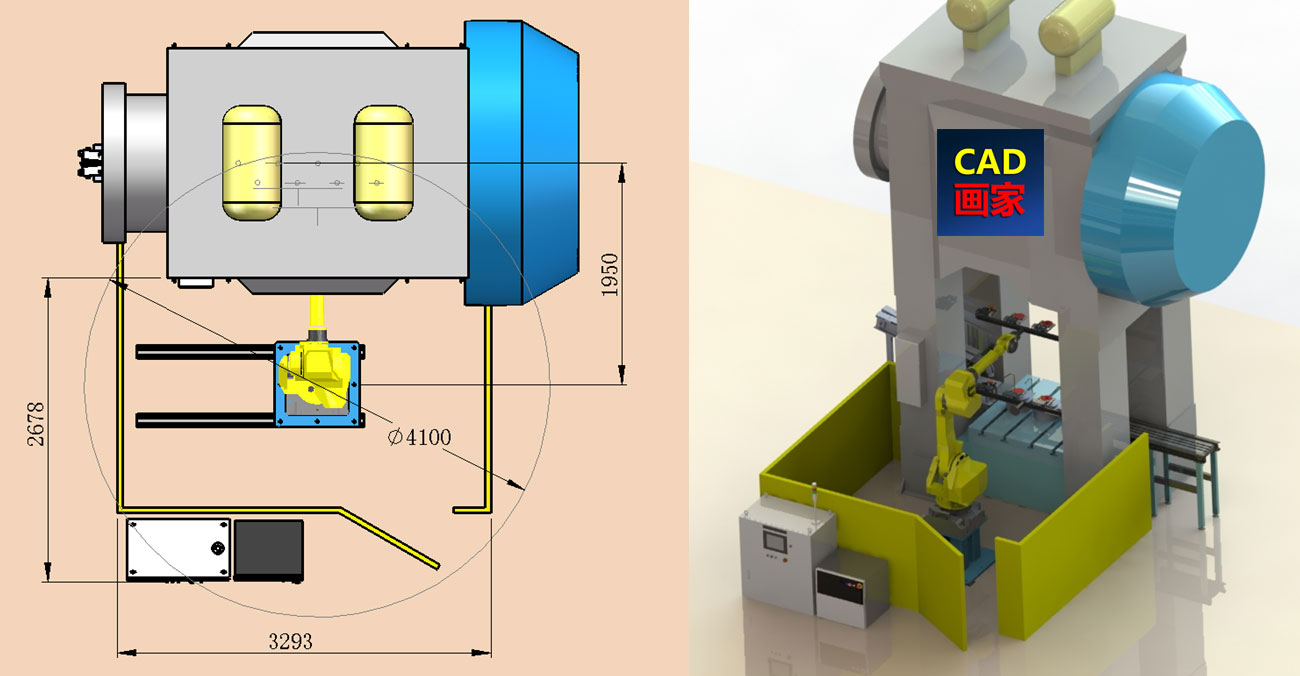 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载