
 二次元漫展可爱猫爪加厚加绒兽装手套肉垫发声保暖搞怪Cosplay
二次元漫展可爱猫爪加厚加绒兽装手套肉垫发声保暖搞怪Cosplay  初兽猫fursuit 手作兽装 furry兽爪 兽人 兽爪 定制爪 室外
初兽猫fursuit 手作兽装 furry兽爪 兽人 兽爪 定制爪 室外  兽爪 吱吱叫 带指甲 furry兽装爪子 手套COS猫爪可爱毛绒成品道具
兽爪 吱吱叫 带指甲 furry兽装爪子 手套COS猫爪可爱毛绒成品道具 搬运工件的手爪(或工具)的重量改如何计算,很多自动化项目在手爪具体结构设计之初,就要预估手爪的重量,以方便机器人、机械手或其他搬运工具的选型。
下面是手爪(工具)重量估算的一个经验:
小于5Kg的工件,手爪重量按5Kg计算(气缸0.5Kg+手指手指块2Kg+法兰连接板2Kg+其他附件0.5Kg);
对于5~30Kg的小工件,手爪的重量和工件的重量相当;
30Kg~100Kg的工件,手爪重量是工件重量的2倍;
500~700Kg的工件,手爪重量200Kg;
其中500~700Kg的工件,手爪重量200Kg,参考库卡机器人网站上文章“一汽集团采用 KUKA KR 1000 titan 安装气缸体”,具体内容如下:
重载型机器人转动700 kg的气缸体
如果要转动重达 700 kg 所谓 6DM 柴油机的气缸体,例如在安装汽缸排、曲轴和油 池时,则对装配线上的作业任务极具挑战性。使用旋转和起重装置以及人力的传统搬 运方法由于空间需求大和效率低而已遭淘汰。对于重量为 500 至 700 kg 的工件和 200 kg 重的抓爪,只有负载能力达 1000 kg 的重载型机器人才适用于该作业任务。
库卡的Titan轻松操作气缸体
当约 500 kg 重的气缸体在安装前到达工作单元时,KUKA KR 1000 titan 在传感器 的控制下将其抓取并放到工件支架上。自此气缸体将按程序经过几个步骤,其中包括安 装连杆、气缸、油池等。在执行该安装作业期间,机器人必须将气缸体在一个规定位置 上精确地转动 90 度。在作业完成后,重达 700 kg 的气缸体重新返回工作单元,KR 1000 抓取并转动 180 度将其放到上部工件支架上,然后安装好的气缸体继续其在装 配线上的旅程。
上述只是手爪重量预估,手爪的重量和工件的重量、大小、形状、重心位置等因素相关,最终要经过具体结构设计之后,才能确定手爪的重量。
参考文献:ttps://www.kuka.com/zh-cn/行业/机器人自动化解决方案数据库/2016/07/kuka-机器人在一汽集团的解决方案
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1130
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 任鸟飞 原文链接:https://www.cad2d3d.com/post-1130.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




可能感兴趣的文章
 有人在卖 -280℃ 的轴承,突破物理定律,再一次“遥遥领先”
有人在卖 -280℃ 的轴承,突破物理定律,再一次“遥遥领先” 钎焊中的“钎”是什么意思?科技词汇为什么有这么多生僻字啊!
钎焊中的“钎”是什么意思?科技词汇为什么有这么多生僻字啊!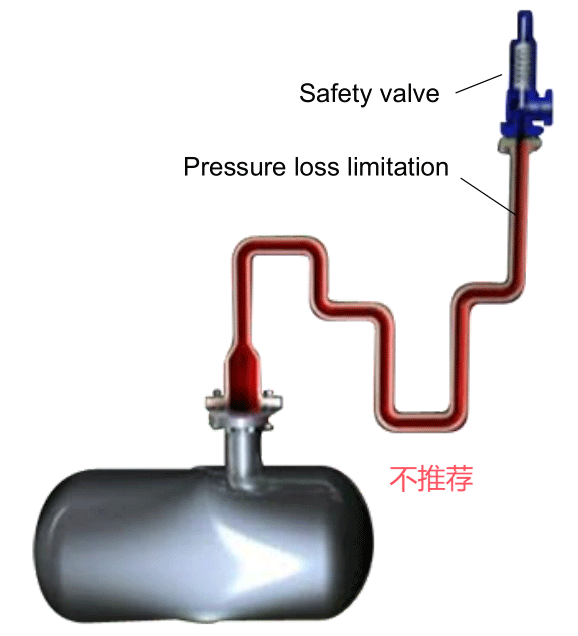 莱斯安全阀安装位置要求及说明
莱斯安全阀安装位置要求及说明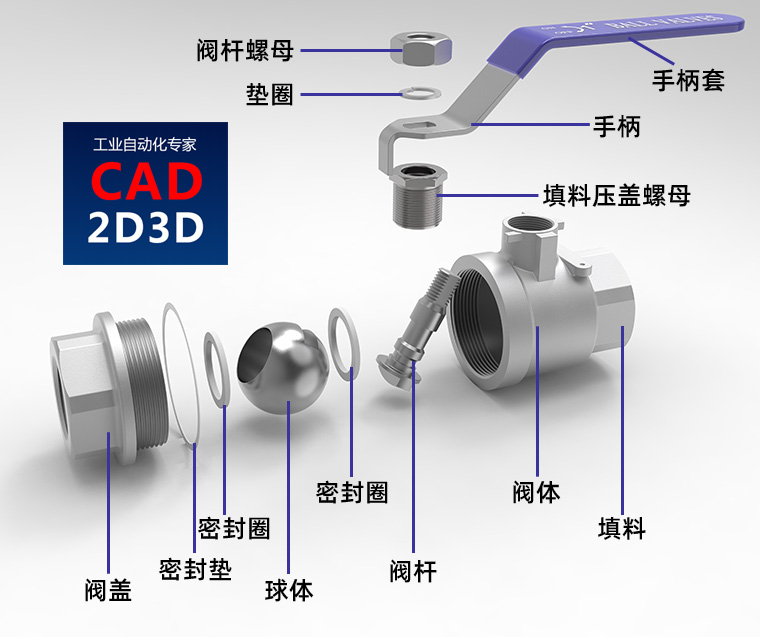 一片式球阀、两片式球阀、三片式球阀和广式球阀的内部构造和区别
一片式球阀、两片式球阀、三片式球阀和广式球阀的内部构造和区别 农村大爷暴力改装之后的气井,原始与现代科技的碰撞,高手在民间
农村大爷暴力改装之后的气井,原始与现代科技的碰撞,高手在民间 气缸速度调节阀内部构造和原理,排气节流和进气节流的特性及动作比较
气缸速度调节阀内部构造和原理,排气节流和进气节流的特性及动作比较更多最新发布: 技术教程
-
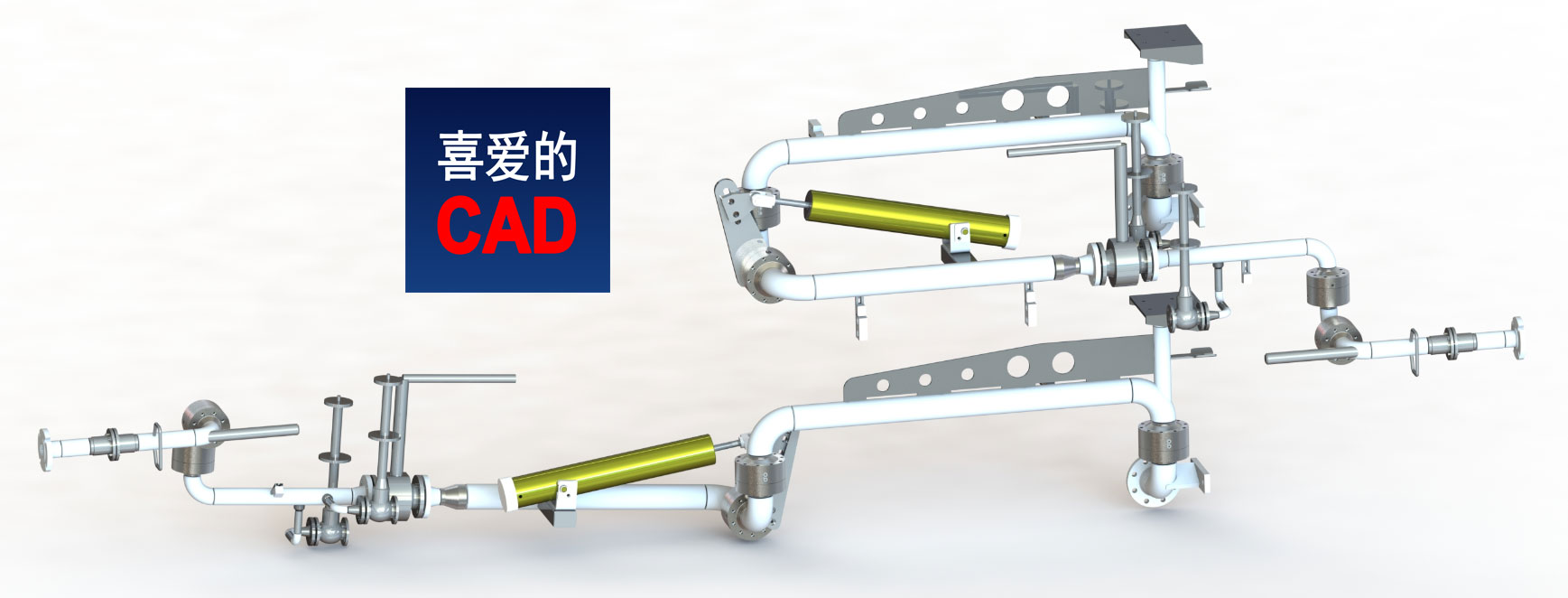 LNG 装卸臂(鹤管)高清三维效果图
LNG 装卸臂(鹤管)高清三维效果图
-
 超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
超低温拉断阀分类、内部构造和运行原理,含高清实物图、内部结构图和讲解视频
-
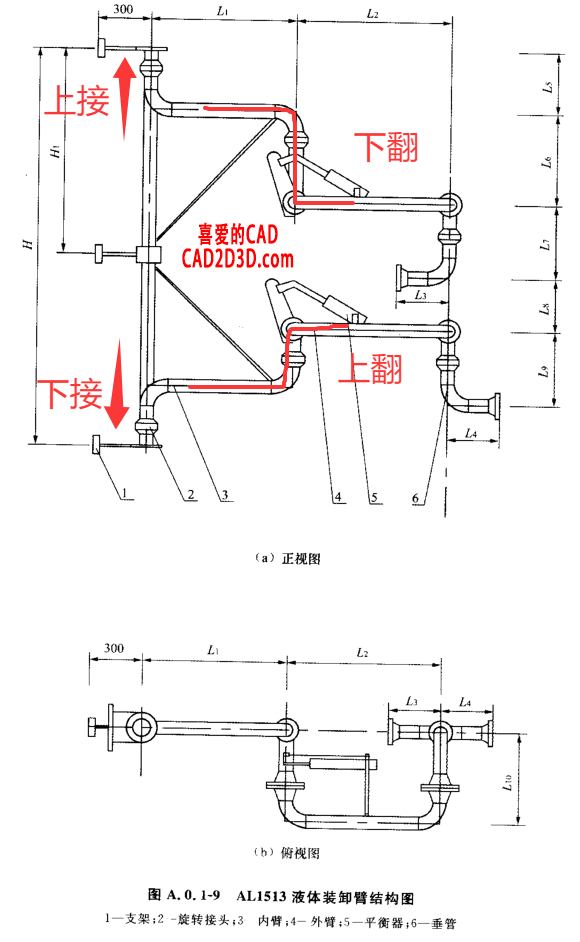 液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
液体装卸臂(鹤管)结构形式中的上接式、下接式、上翻式、下翻式是什么意思?
-
标准中的 必须、严禁、应、不应、不得、宜、不宜、可 的用词说明
-
SH∕T 3221-2023 石油化工物料汽车装卸设施设计标准有关装卸速度(流速)的要求
-
 铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
铝居然是最强金属,最低使用温度 -270 ℃,差一点就要打破绝对零度
-
GB 50093 自动化仪表工程施工及质量验收规范 温度、压力取源部件安装规定、条文解释说明及案例解析
-
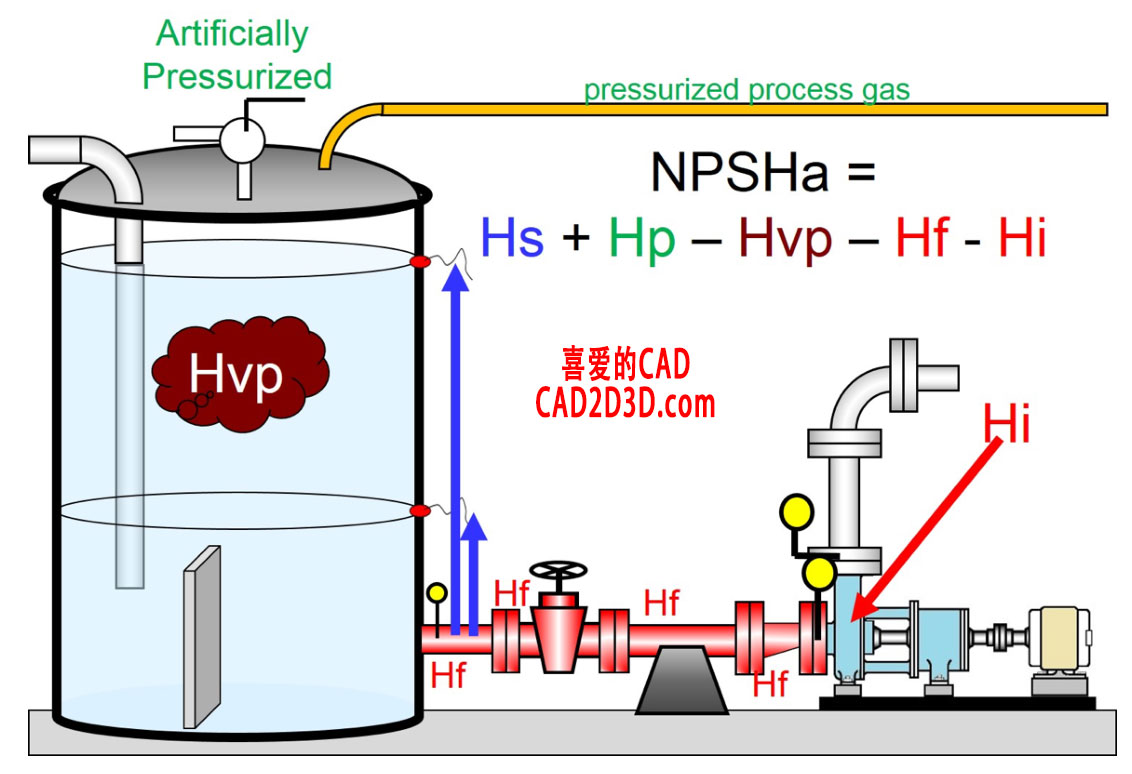 美标 ANSI/HI 对离心泵 NPSH、NPSHR、NPSHA 的定义、解释和计算示例,看完美标之后茅塞顿开
美标 ANSI/HI 对离心泵 NPSH、NPSHR、NPSHA 的定义、解释和计算示例,看完美标之后茅塞顿开
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载