
 协作机器人 工业机械臂用途 焊接 喷涂 搬运 点胶 打螺丝 焊锡
协作机器人 工业机械臂用途 焊接 喷涂 搬运 点胶 打螺丝 焊锡  YROBOT威洛博2指Y型协作电爪EPG2-100-50驱控一体精密力控
YROBOT威洛博2指Y型协作电爪EPG2-100-50驱控一体精密力控  法奥意威协作机器人拖拽编程焊接机器人FR10二保焊激光焊现货出售
法奥意威协作机器人拖拽编程焊接机器人FR10二保焊激光焊现货出售 在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。
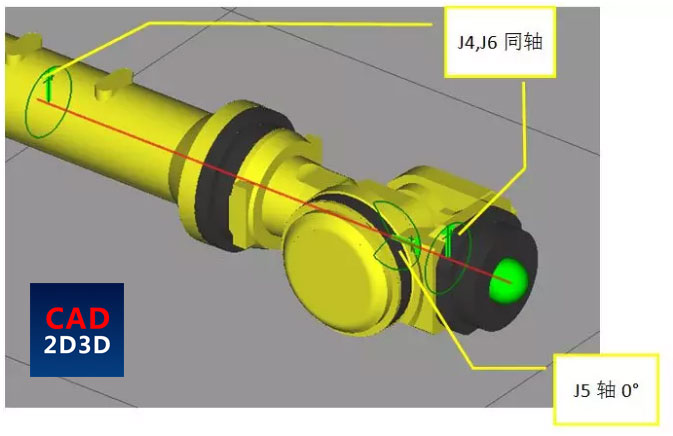
图1 机器人奇异点位置
当机器人J5轴处于0°位置,机器人会出现MOTN-023报警:
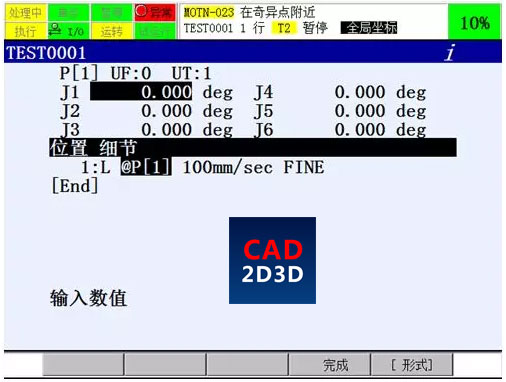
图2 MOTN-023报警
当机器人在执行动作类型为L,C,A的动作指令时,如需经过奇异点,机器人会出现MOTN-063报警

图3 MOTN-063报警
针对奇异点的处理方法
情况一:在机器人示教时遇到奇异点
处理步骤:
a)将机器人的示教坐标系切换到关节

图4 示教坐标系的切换
b)点动机器人,让J5轴调离0°的位置,建议小于-3°或者大于3°
c)按RESET键复位报警
情况二:在程序运行时遇到奇异点
方法一:适合在无精细点位要求使用。
当运行程序时遇到奇异点,可以将该行动作指令的动作类型改为J,或者修改机器人的位置姿态,以避开路径当中存在的奇异点。
方法二:适合在有精细点位要求使用。
在动作指令后添加附加动作指令:手腕关节动作指令WJNT(全名Wrist Joint)。
手腕关节动作指令(Wrist Joint),不在轨迹控制中对手腕的姿势进行控制(标准设定下,程序运行时,手腕的姿势始终被控制)。在直线动作、C圆弧动作、A圆弧动作时能够使用该指令。
当遇到奇异点时,程序中使用该指令,手腕的姿势在动作中发生变化,避开奇异点造成的手腕轴反转动作,使得工具中心点继续沿着轨迹动作。
处理步骤:
a)将光标移*出现奇异点程序行行末,点击F4选择
b)选择Wrist Joint
c)按RESET键复位报警
d)运行程序,观察运行轨迹
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1316.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




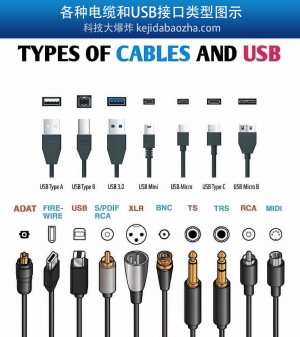 各种电缆接口及USB接口类型图示,接口中英文对照,一图胜过千言万语
各种电缆接口及USB接口类型图示,接口中英文对照,一图胜过千言万语 小型空气压缩机
小型空气压缩机 破碎花盆创意搭
破碎花盆创意搭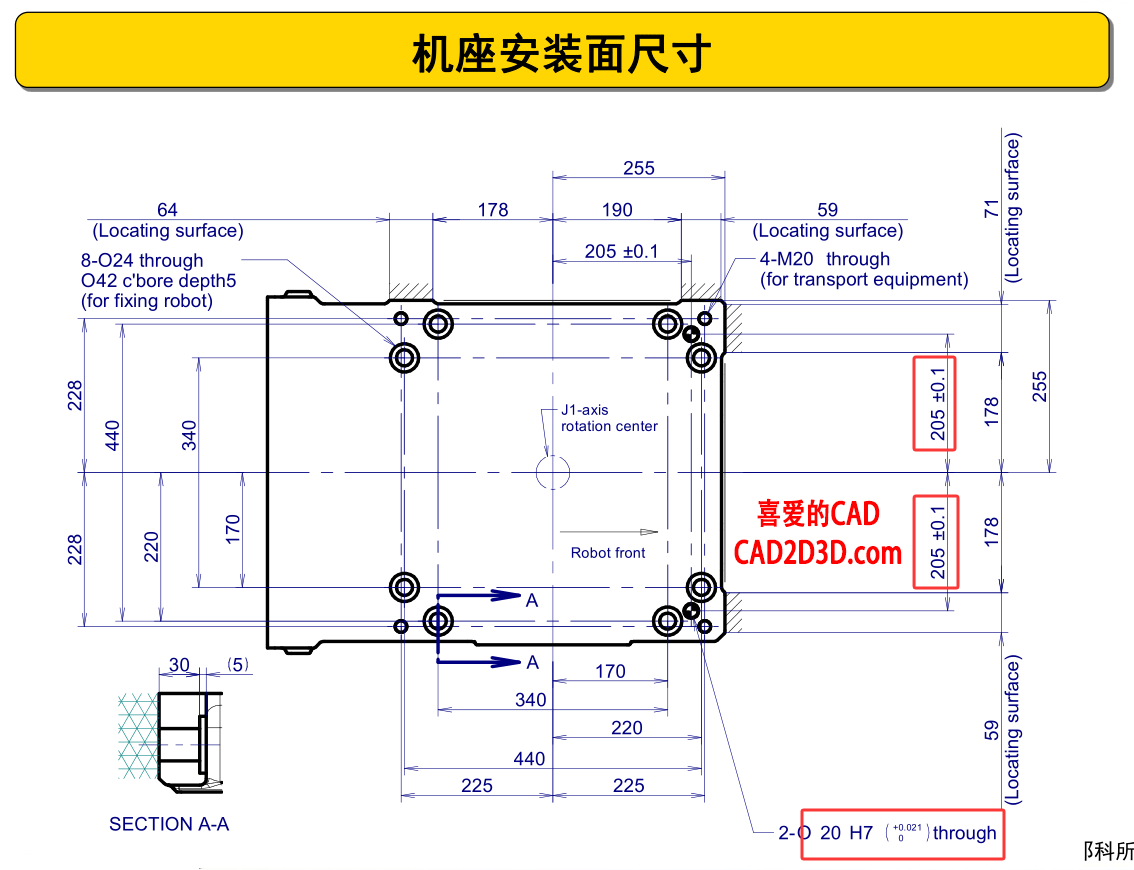 机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
机器人安装定位方法及示例,机器人基座不一定有定位销孔,难道定位对机器人安装不重要吗?
 大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
大跌眼镜!机器人居然走不了直线!FANUC M-710iC/50 机器人圆形轨迹精度 0.525mm
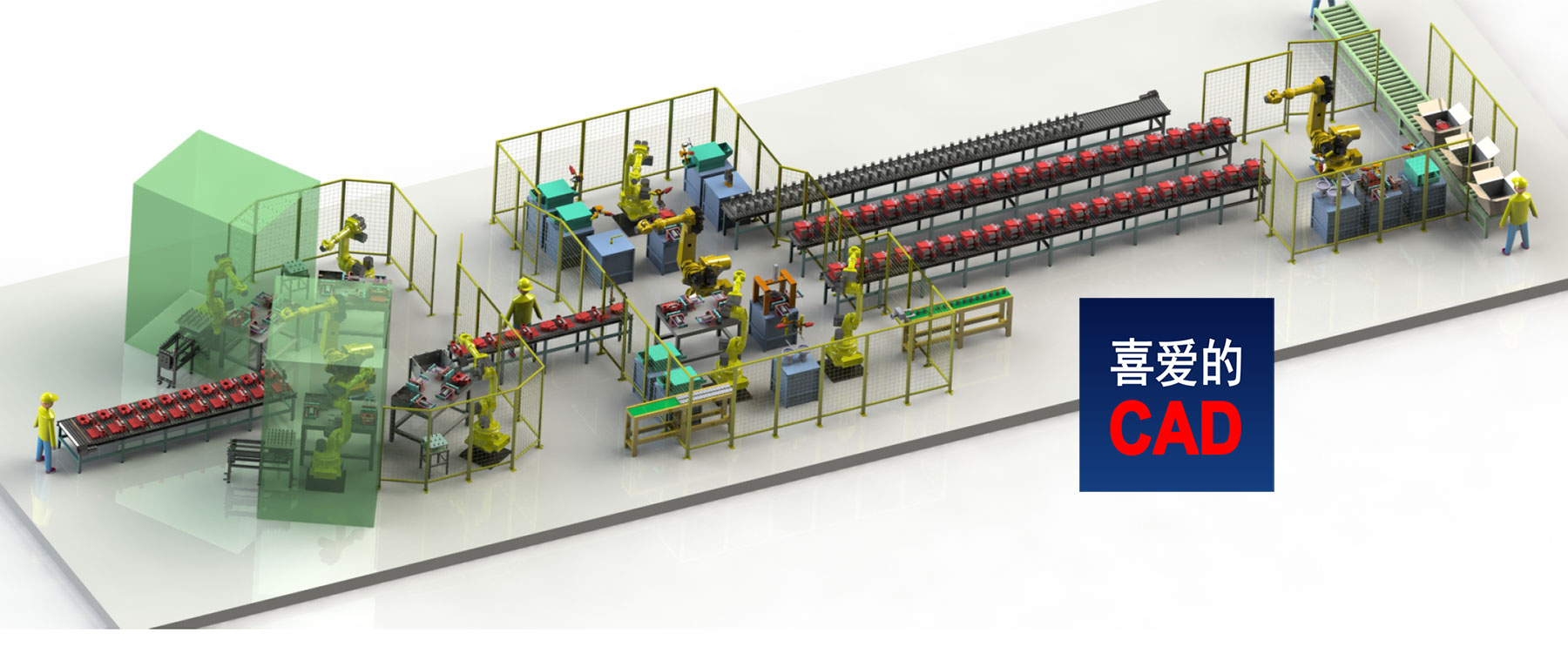 高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
高速轴制动器自动化打磨及装配项目机器人自动化单元设计方案
 机器人码垛自动化单元设计方案
机器人码垛自动化单元设计方案
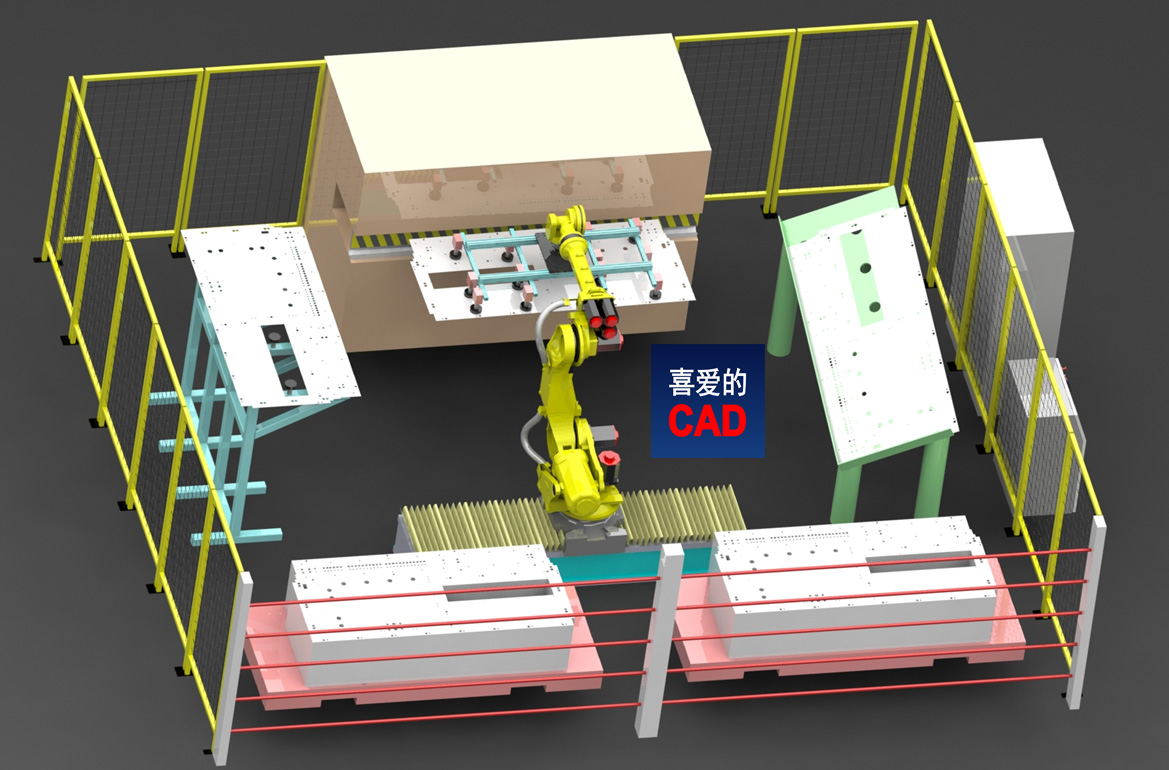 钣金折弯机器人上下料自动化单元系统设计方案
钣金折弯机器人上下料自动化单元系统设计方案
 汽车车轮制动鼓机加工机器人自动上下料技术解决方案
汽车车轮制动鼓机加工机器人自动上下料技术解决方案
 国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
国产机器人完胜!8颗螺钉就能解决的问题,日本居然用了24颗
 为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
为什么只有我们的机器人使用开口弹垫?不敢多想,想多了越发迷茫
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载