第三章
摆动运动机构
偏心重锤摆动运动(振动)机构
第 三 章 ”摆动 运动 机 构
偏心 重 锤 摆动 运动 〈 振 动 ) 机 构
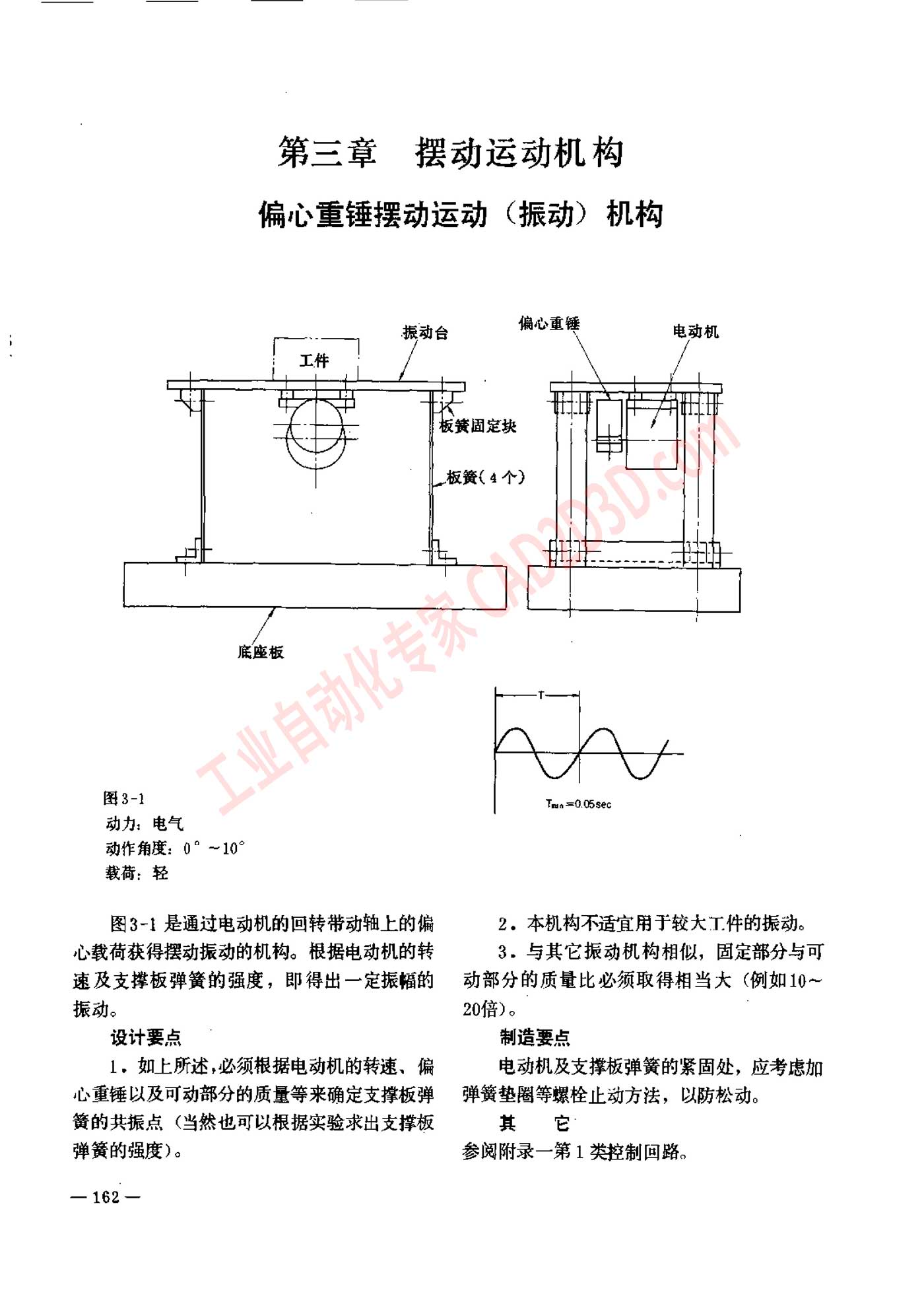
医 3-1
动力 : 电气
动作 角度 : 0” ~10”
载荷 : 轻
图 3-1 是 通过 电动 机 的 回转 带动 轴 上 的 仿
心 载荷 获得 摆动 振动 的 机 构 。 根 据 电 动机 的 转
速 及 支撑 板 弹 稀 的 强度 , 即 得 出 一 定 振幅 的
振动 。
设计 要 点
1 .如 上 所 述 ,必须 根据 电动 机 的 转速 、 仿
心 重 锤 以 及 可 动 部 分 的 质量 等 来 确定 支撑 板 弹
筑 的 共振 点 〈 当 然 也 可 以 根据 实验 求 出 支撑 板
弹簧 的 强度 ) 。
— 162 —
Teun =0.055ec
2 。 本 机 构 不 适宜 用 于 较 大 工件 的 振动 。
3. 与 其 它 振动 机 构 相 似 , 固 定 部 分 与 可
动 部 分 的 质量 比 必 须 取得 相当 大 〈 例 如 10 一
20 倍 ) 。
制造 要 点
电动 机 及 支撑 板 弹簧 的 紧 固 处 , 应 考虑 加
弹簧 垫 阮 等 螺栓 止 动 方法 , 以 防 松动 。
其 它
参阅 附录 一 第 1 类 控制 回路 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)