大回转半径摆动运动机构
大 回转 半 和
径 摆 动 运动 机 构
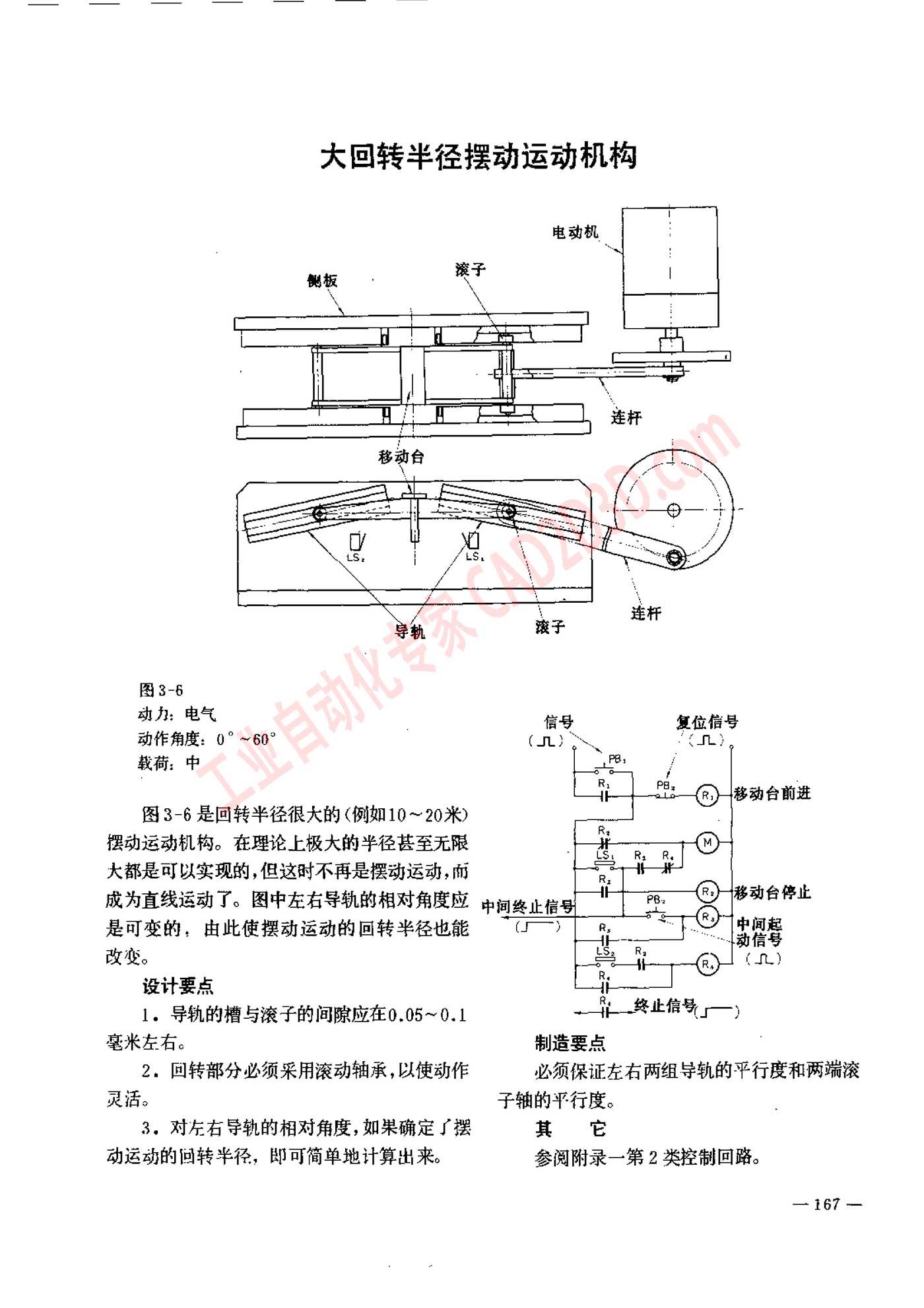
图 3-8
动力 : 电气
动作 角度 : 0 ”~60?
载荷 : 中
图 3-6 是 回转 半径 很 大 的 (例如 10 一 20 米 )
摆动 运动 机 梅 。 在 理论 上 极 大 的 学 径 甚至 无 限
大 都 是 可 以 实现 的 ,但 这 时 不 再 是 打动 运动 ,而
成 为 直线 运动 了 。 图 中 左右 导轨 的 相对 角度 应 中 间作 止 信 呈
是 可 变 的 , 由 此 使 摆动 运动 的 回转 半径 也 能
改变 。
设计 要 点
1 。 导 委 的 模 与 深 子 的 间隙 应 在 0.05 一 0.1
2. 回转 部 分 必须 采用 滚动 轴承 , 以 使 动作
灵活 。
3, 对 左右 导轨 的 相对 角度 , 如 果 确 定 了 摆
动 运动 的 回转 半径 , 邵 可 简单 地 计算 出 来 。
2
*-’;l'——fi‘ltfigr.:—‘
制造 要 点
必须 保证 左右 两 组 导轨 的 平行 度 和 两 端 滚
子 辅 的 平行 度 。
其 它
参阅 附录 一 第 2 类 深 制 回路 。
— 167 —
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)