往复速度不同的摆动运动机构
往复 速度 不 同 的 摆动 运动 机 构
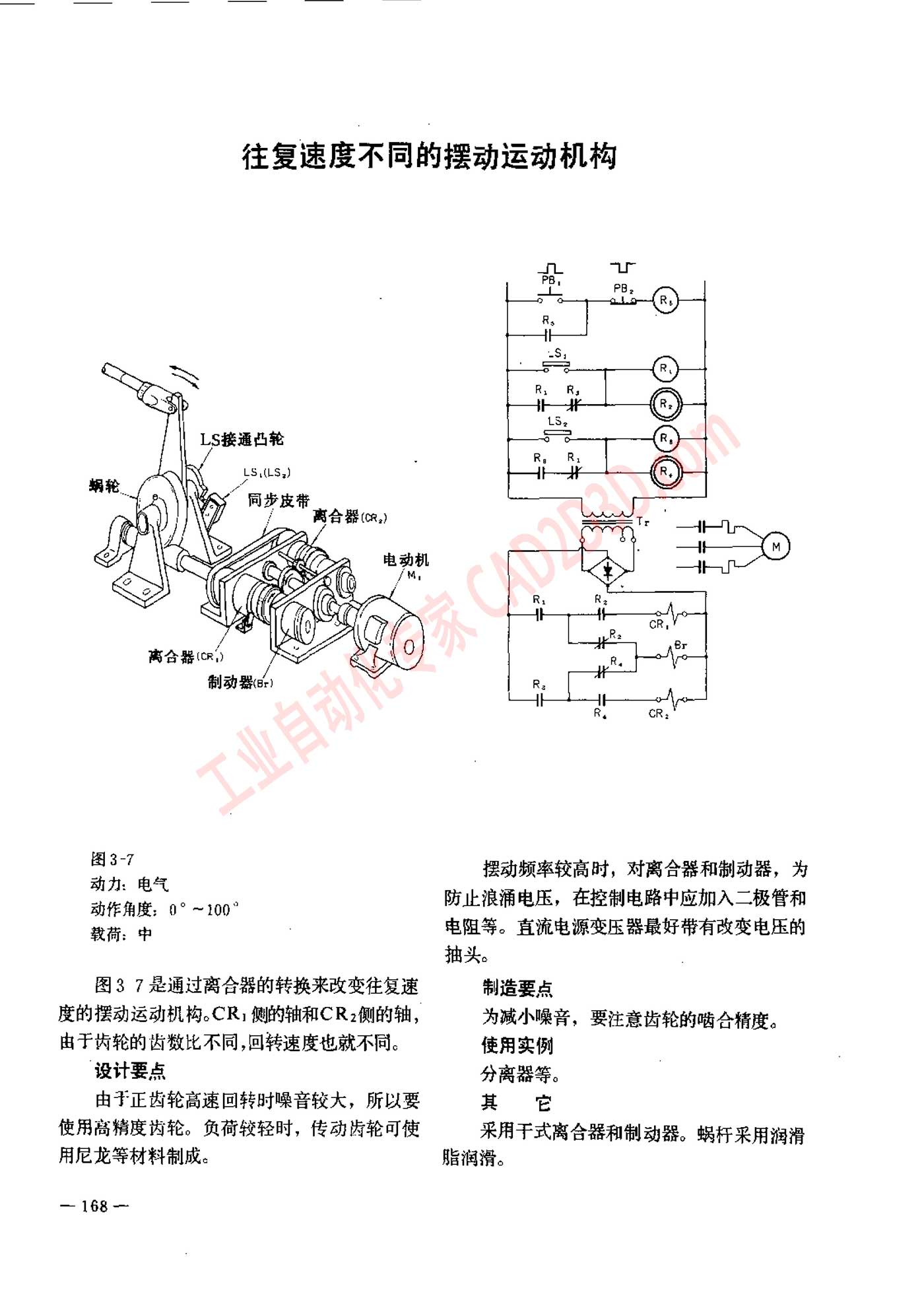
图 3-7
动力 电气
摆动 频率 较 高 时 , 对 离合 器 和 制动器 , 为
动作 角度 : 0" ~ 100”
载荷 , 中
防止 浪 涌 电 压 , 在 控制 电路 中 应 加 入 二 极 管 和
昌 阻 等 。 直 流 电 源 变 压 器 最 好 带 有 改变 电压 的
ke
图 3 7 是 通过 离合 器 的 转换 来 改变 往复 速
度 的 摆动 运动 机 构 。CR 侧 的 轴 和 CR : 侧 的 轴 ,
由 于 齿轮 的 齿 数 比 不 同 ,回转 速度 也 就 不 同 。
设计 要 点
由 于 正 此 轮 高 速 回转 时 噪音 较 大 , 所 以 要
使 用 高 精度 疮 轮 。 负 荷 饼 轻 时 , 传 动 齿轮 可 使
用 尼龙 等 材料 制 成 。
— 168 —
制造 要 点
为 减 小 噪音 , 要 注意 齿轮 的 固 合 精 度 。
使 用 实例
分 离 器 等 。
其 它
采用 于 式 离合 器 和 制动器 。 蝇 杆 采用 渔 滑
B
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)