改变杠杆比的摆动角可变摆动运动机构
MITATAT LB 123 A AT 1R B0IE B A4
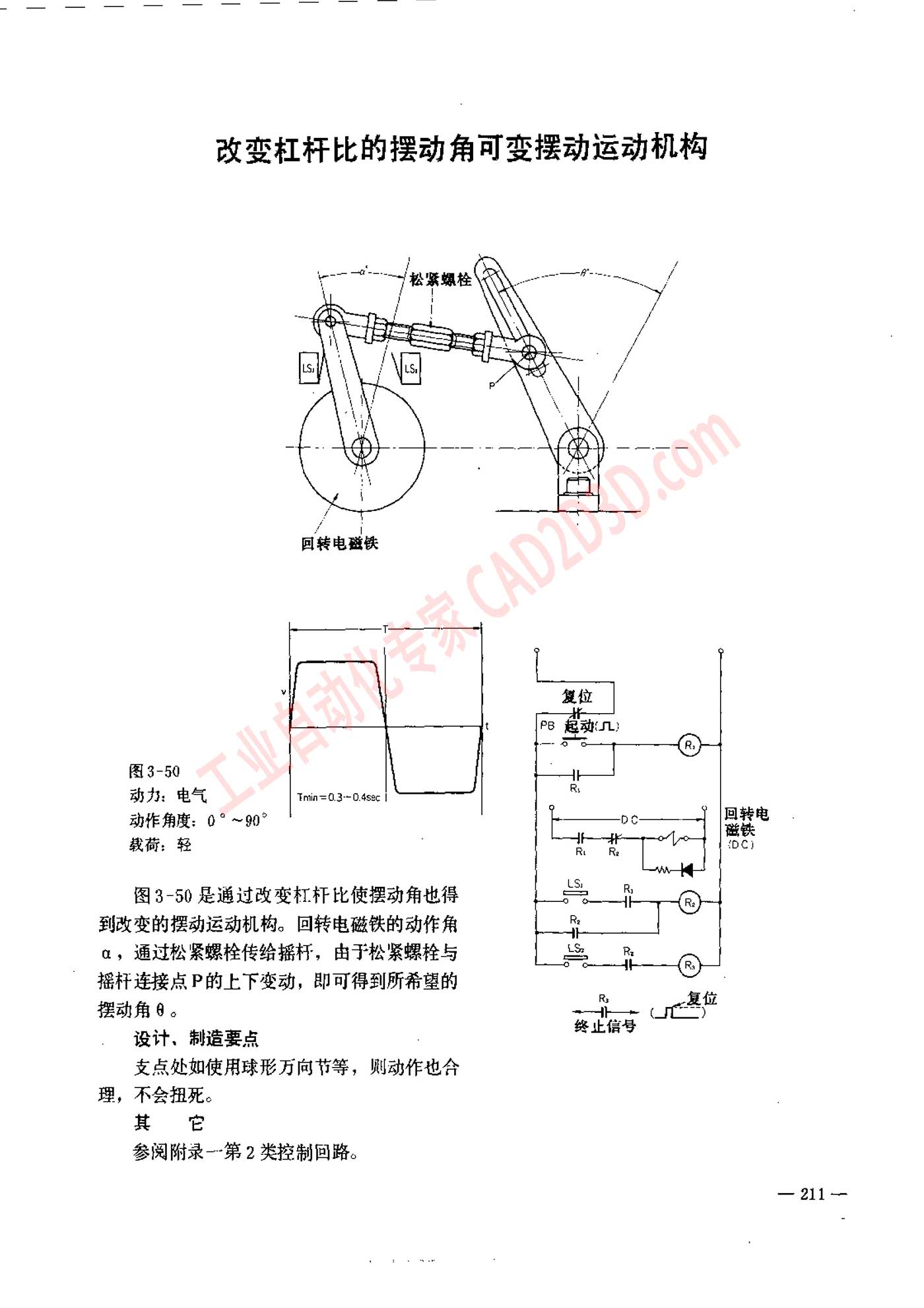
A 3-50
动力 ;电气 Tmin=03--D4ssc |
动作 角度 : 0 " ~90”
载荷 : 轻
图 3-50 是 遂 过 改变 杠杆 比 使 摆动 角 也 得
到 改变 的 摆动 运动 机 构 。 回 转 电 磁铁 的 动作 角
a , 通 过 松紧 螺栓 传 给 播 杆 , 由 于 松紧 螺栓 与
摇 杆 连接 点 P 的 上 下 变动 , 即 可 得 到 所 希望 的
摆动 角 4 。
设计 、 制 造 南 点
支点 处 如 使 用 球形 万 向 节 等 , 则 动作 也 合
B, M.
其 它
参阅 附录 一 第 2 类 控制 回路 。
一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)