
 伯朗特六轴工业机器人可搬运 码垛 焊接喷涂上下料 负载5KG-100KG
伯朗特六轴工业机器人可搬运 码垛 焊接喷涂上下料 负载5KG-100KG  码垛机器人纸箱搬运机械手臂全自动包装码垛机袋装搬运工业机器人
码垛机器人纸箱搬运机械手臂全自动包装码垛机袋装搬运工业机器人  伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM
伯朗特BRTIRUS0805A六轴工业机器人赋能智造升级负载5KG臂展940MM 2.4.3 机器人和机械手
2.4.3.1 机器人
关节型机器人,属于标准产品,直接选型即可,无非标定制,质量可靠,运行稳定。

图21 6轴机器人
2.4.3.2 机械手
非标定制的较多,质量和精度较难保证。
重载机械手负载能力远超关节型机器人,可以搬运20T重物。
深度阅读:
- 重载机械手技术规格:https://www.cad2d3d.com/post-1309.html
- 锻造行业步进梁案例视频:https://www.cad2d3d.com/post-1377.html

图22 桁架机械手
2.4.3.3 地轨
机器人地轨主要由框架、导轨滑块、齿轮齿条、电机减速机、润滑系统、防护装置等组成。
深度阅读:
- FANUC地轨介绍:https://www.cad2d3d.com/post-1071.html
- KUKA地轨介绍:https://www.cad2d3d.com/post-1161.html
- 地轨对地面的要求及安装方法:https://www.cad2d3d.com/post-1128.html

图23 机器人地轨
2.4.3.4 手爪
手爪的驱动方式有气动、液压和电动,用的最多的就是气缸。
工件比较大,重量比较重的,可以考虑使用液压驱动。
电动手爪适合夹持力精确控制的场合。
深度阅读:
- 大行程开合气缸介绍:https://www.cad2d3d.com/post-1375.html
- 平行和关节旋转开合手爪的结构对比:https://www.cad2d3d.com/post-1188.html
- 手指跟随工件表面的设计方法:https://www.cad2d3d.com/post-1321.html
- 同步收缩开合机构介绍:https://www.cad2d3d.com/post-1054.html
- 电永磁吸盘介绍:https://www.cad2d3d.com/post-961.html
- 带弹簧推板的三爪气缸结构介绍:https://www.cad2d3d.com/post-848.html
- 平行开合手爪夹持力计算方法:https://www.cad2d3d.com/post-1419.html
- 手爪变形计算方法:https://www.cad2d3d.com/post-1331.html
1) 平行开合气缸
平行开合气缸是最常见的手爪驱动方式,通常情况下开合行程较小。
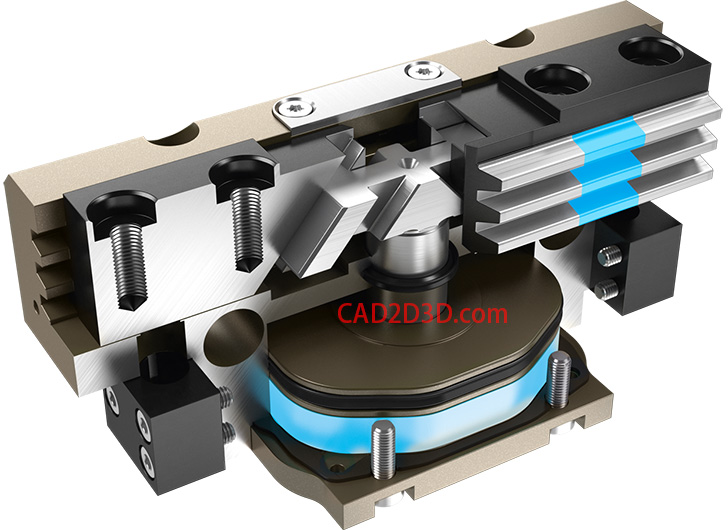
图24 平行开合气缸
2) 大行程开合气缸
为了兼容不同外径的工件开发的大行程开合气缸,可以用来夹持汽车轮毂等。
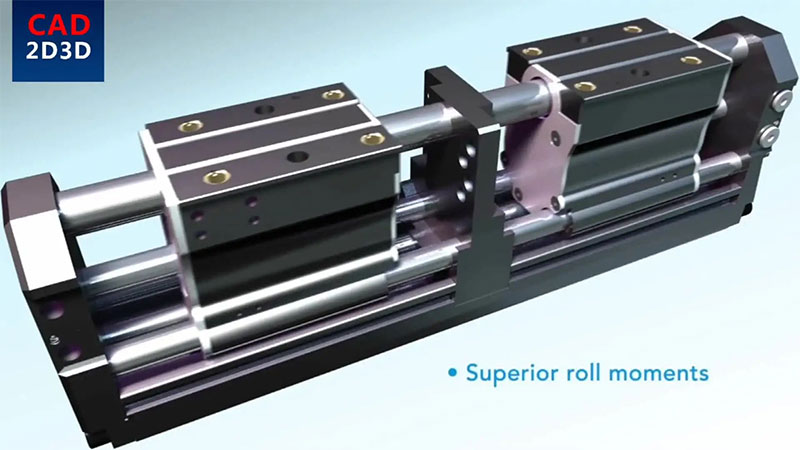
图25 大行程开合气缸
3) 电永磁手爪
电永磁手爪结构简单,对工件定位精度要求不高,可以抓取方型和圆柱形工件。

图26 电永磁手爪
4) 定心三爪气缸
三爪的主要特点就是定心,提高工件的抓取精度。

图27 定心三爪
5) 真空吸盘
真空吸盘使用约光滑表面的工件抓取,比如纸箱、钢板等。

图28 真空吸盘
6) 手爪案例
下面是一个曲轴抓取手爪,平行对夹的方式实现曲轴夹取。

图29 机器人手爪案例
未完待续
更多精彩内容请参见完整版教材。
《工业机器人系统集成自动化生产线方案设计大师》教材获取方法:
关注微信公众号 CAD2D3D,回复 方案大师 获取本教材。
未完待续 ~
输入暗号阅读全文
暗号:
暗号获取方式
关注本站微信公众号 喜爱的CAD,私信回复:
暗号1537
即可自动获取。
手机扫描下方二维码快速关注公众号 喜爱的CAD ↓↓↓

转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1537.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。
也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 螺帽类型及对应的实物图,各种螺帽名称中英文对照
螺帽类型及对应的实物图,各种螺帽名称中英文对照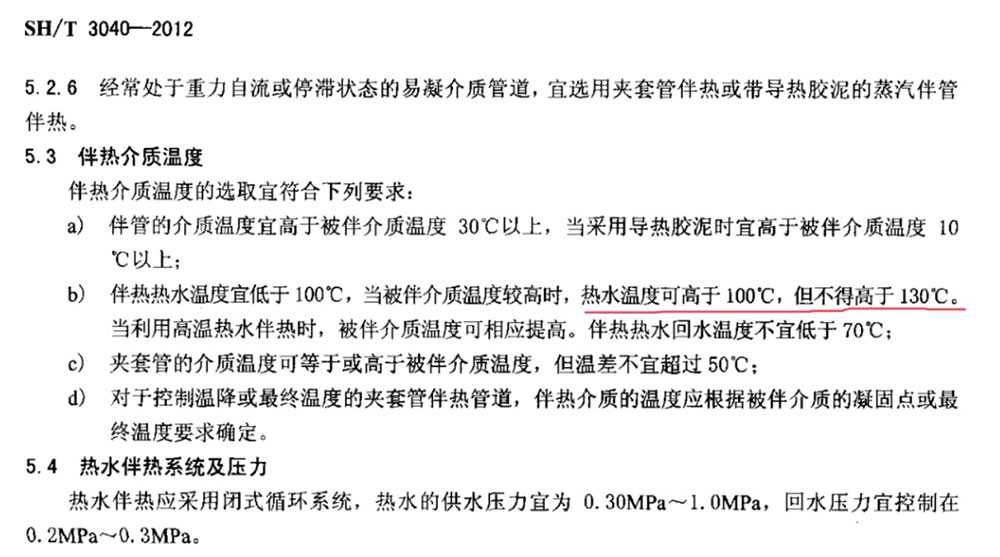 笑掉大牙?水的温度可以达到130℃吗?难道是我物理老师教错了?
笑掉大牙?水的温度可以达到130℃吗?难道是我物理老师教错了? 地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元
地价上涨,国内立体库开始爆发,一个汽车壳体立体库,节省千万元 机器人加3D视觉轮廓扫描 识别镁锭/铝锭工件形态位置 实现准确抓取
机器人加3D视觉轮廓扫描 识别镁锭/铝锭工件形态位置 实现准确抓取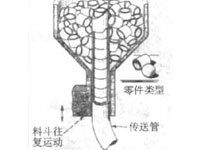 球及短圆柱体自动筛选进料机构
球及短圆柱体自动筛选进料机构 如何在SolidWorks中增加GB(国标)焊件(结构构件)库及自定义轮廓形状
如何在SolidWorks中增加GB(国标)焊件(结构构件)库及自定义轮廓形状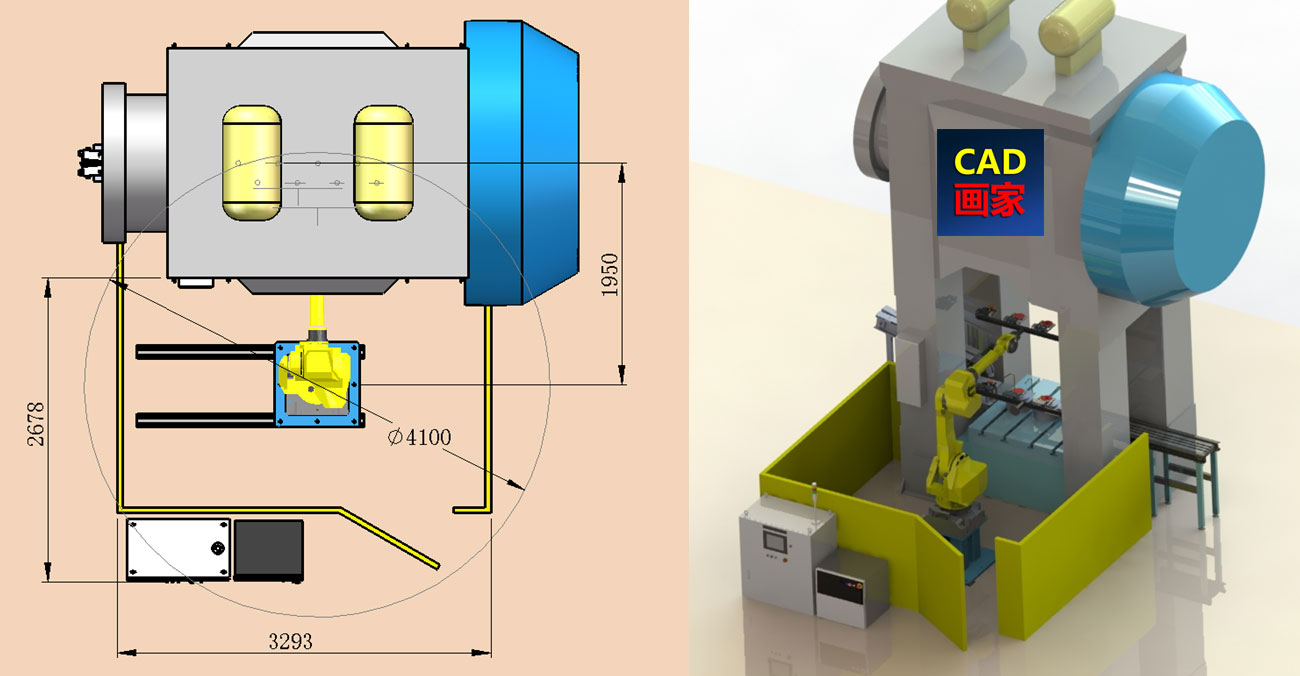 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载