摆动缸摆动运动机构
摆动 缸 择 动 运动 机 构
SOL,
PRI S
LS, TY
上 前 进 完毕
| 起 而 信号 | S 原 位 置
Tmn=1s€C {-L)--- 一 Pa R, SR
qsm(@fitif)a%»—i' :
Hfi—l 后 退 指令
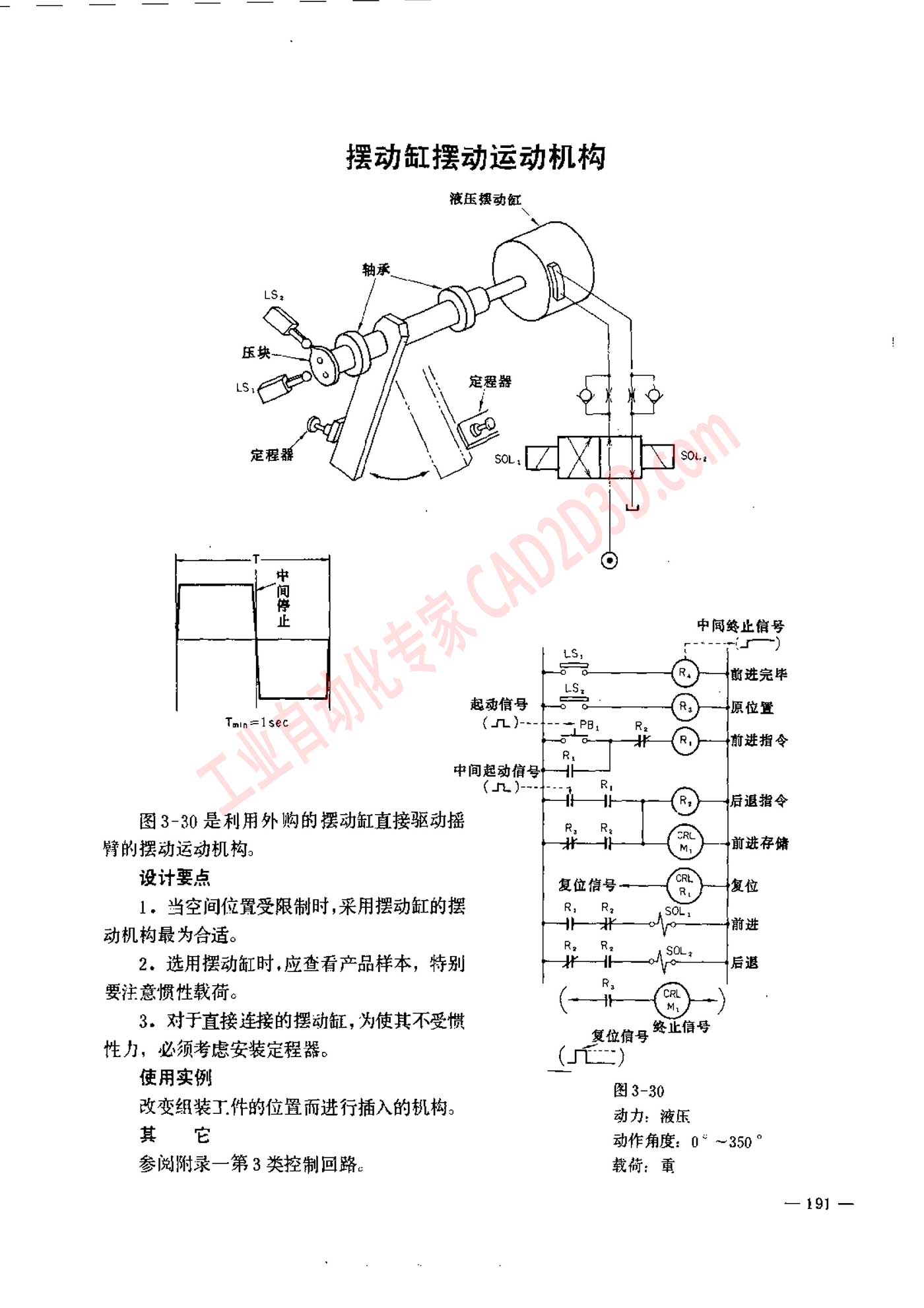
图 3-30 是 利用 外 网 的 摆动 缸 直 接 驱 动 揪 0 庆
劈 的 舞动 运动 机 构 。 A R
设计 要 点 复位 信号 复位
1。 当空 间 位 置 受 限 制 时 ,采用 摆动 缸 的 皖 R,
动机 构 最 为 合适 。 县
2。 选 用 摆动 和 红 时 ,应 查看 产品 样本 , 特 别 —H— o B
要 注意 惯性 载荷 。 ——®
3。 对 于 直接 连接 的 摆动 托 , 为 使 其 不 受 司 4 人
性 力 , 必 须 考 虑 安装 定 程 器 。 站 )
使 用 实例
改变 组 装 工人 的 位 置 而 进行 插入 的 机 构 。 b, Wi
其 它 动作 角度 ,0* ~350"
参阅 附录 一 第 3 类 控制 回路 。 £ &
—19] —
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)