- 库卡(KUKA)机器人液压平衡缸的构造、原理、技术参数
- 液压平衡缸内部构造和原理,Hydraulic Counterbalance
- 气动平衡缸构造和原理,Pneumatic Counterbalances Gas Spring Cylinder
- 方案大师:2.4.5 物流转运设备大全
- 方案大师:2.4.4 自动化配套设备装置大全
- 精密板式直线导轨结构原理
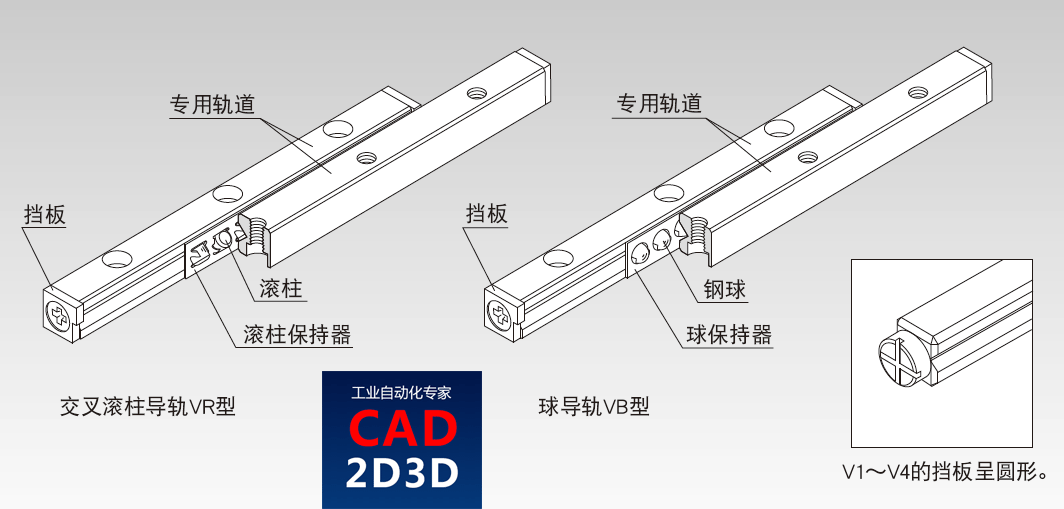 交叉滚柱直线导轨结构和原理,及在滑台气缸上的应用案例
交叉滚柱直线导轨结构和原理,及在滑台气缸上的应用案例- 气缸与导轨滑块连接方式,采用浮动接头结构,避免活塞杆受额外负载
- 电气液快速对接接头,适用于强电、弱电、信号传输、液压等介质的对接
- 机床超声波加工技术,高频微振刀,促进断屑,提高机加工质量
- 马波斯通用测量块结构设计,测量内径、外径和距离
- 机加工自动化生产线方案设计大师,详细介绍生产线形式、料仓、物流转运、手爪、在线测量、工装夹具的结构形式和设计方法
- 极限与配合 国标 GB/T 1800.1,轴孔配合关系是否适用于线性尺寸(两平行平面)?
 波士顿动力 Stretch 机器人,适用于仓储货箱自动装卸
波士顿动力 Stretch 机器人,适用于仓储货箱自动装卸- 方案大师:2.4.3 机器人、机械手、地轨、手爪等结构和原理详述
- 表面粗糙度含义说明及测量方法,日本基恩士粗糙度测量官方培训资料
- 方案大师:2.4 自动化生产线主要设备、2.4.1 主机设备、2.4.2 辅助设备
- 方案大师:2.3.3 自动化生产线节拍计算案例 — 锻造和机加工生产线节拍计算方法和步骤
- 方案大师:2 自动化生产线的世界,主要参数、节拍计算、平衡率
- 方案大师:1.7 机器人离线编程和仿真模拟
- 方案大师:1.6 工业机器人高级功能,软浮动、链速追踪、视觉引导定位
- 方案大师:1.5 工业机器人的节拍计算
- 方案大师:1.4 工业机器人的选型方法
CAD画家3D模型免费下载,用3D看世界,让自动化更简单
CAD画家 提供工业自动化各种机械设备、自动化专机、电气控制装置等2D图纸/3D模型源文件下载。学习机械设计和电气控制等知识教程,分享新工艺、新技术、新产品,汇集自动化和电气控制行业专家,提供工业自动化行业整体技术解决方案。
