
与
工业机器人 相关商品:
查看所有与
工业机器人 相关商品 >>
 景行AGV工厂工业智能搬运配送物机器人高效灵活精准AMR搬运小车
景行AGV工厂工业智能搬运配送物机器人高效灵活精准AMR搬运小车  工业AGV工厂车间智能搬运配送物机器人AMR无轨导航智能配送物小车
工业AGV工厂车间智能搬运配送物机器人AMR无轨导航智能配送物小车  工业机器人 机械手 本体
工业机器人 机械手 本体 1.5 工业机器人的节拍计算
影响机器人的节拍因素很多,比如自身各轴速度、加速度、运动距离、点位停止精度等。
比如FANUC M-20iA机器人,在搬运路径25→300→25→25→300→25、负载质量20kg时的循环时间为0.78s。

图9机器人动作节拍
机器人编程时,直线运动时,速度参数可以输入2000mm/s,但考虑到电机加减速后,实际运行时间会增加。
常用的FANUC R-2000iC/165F机器人,行走2m的距离时,用时大约3s,小机器人会快一些,大机器人会慢一些,如果想得到一个相对准确的时间,可以在FANUC ROBOGUIDE仿真软件里模拟行走一下,但FANUC官方也不保证ROBOGUIDE软件的准确性,都是参考值。
气缸活塞的速度可达1000m/s,但由于使用了调速阀,实际运行时速度会慢很多,气缸开合一次的时间一般约定为2s。
因此机器人从A点抓取工件,行走到B点,然后松开工件,预计用时7s。
深度阅读:
- 机器人速度/节拍分析:https://www.cad2d3d.com/post-960.html
未完待续
更多精彩内容请参见完整版教材。
《工业机器人系统集成自动化生产线方案设计大师》教材获取方法:
关注微信公众号 CAD2D3D,回复 方案大师 获取本教材
转载请注明:
文章作者: 尚延伟 原文链接:https://www.cad2d3d.com/post-1529.html
留言说明:
如对本文有疑问,可关注微信公众号 喜爱的CAD 直接留言即可。手机扫描下方二维码直接关注 喜爱的CAD。

也可以直接发邮件给我,我的邮箱18036678070@cad2d3d.com




 惊!电气工程师一年出差250天,每年多赚25000元,这工作是向往还是逃离?
惊!电气工程师一年出差250天,每年多赚25000元,这工作是向往还是逃离?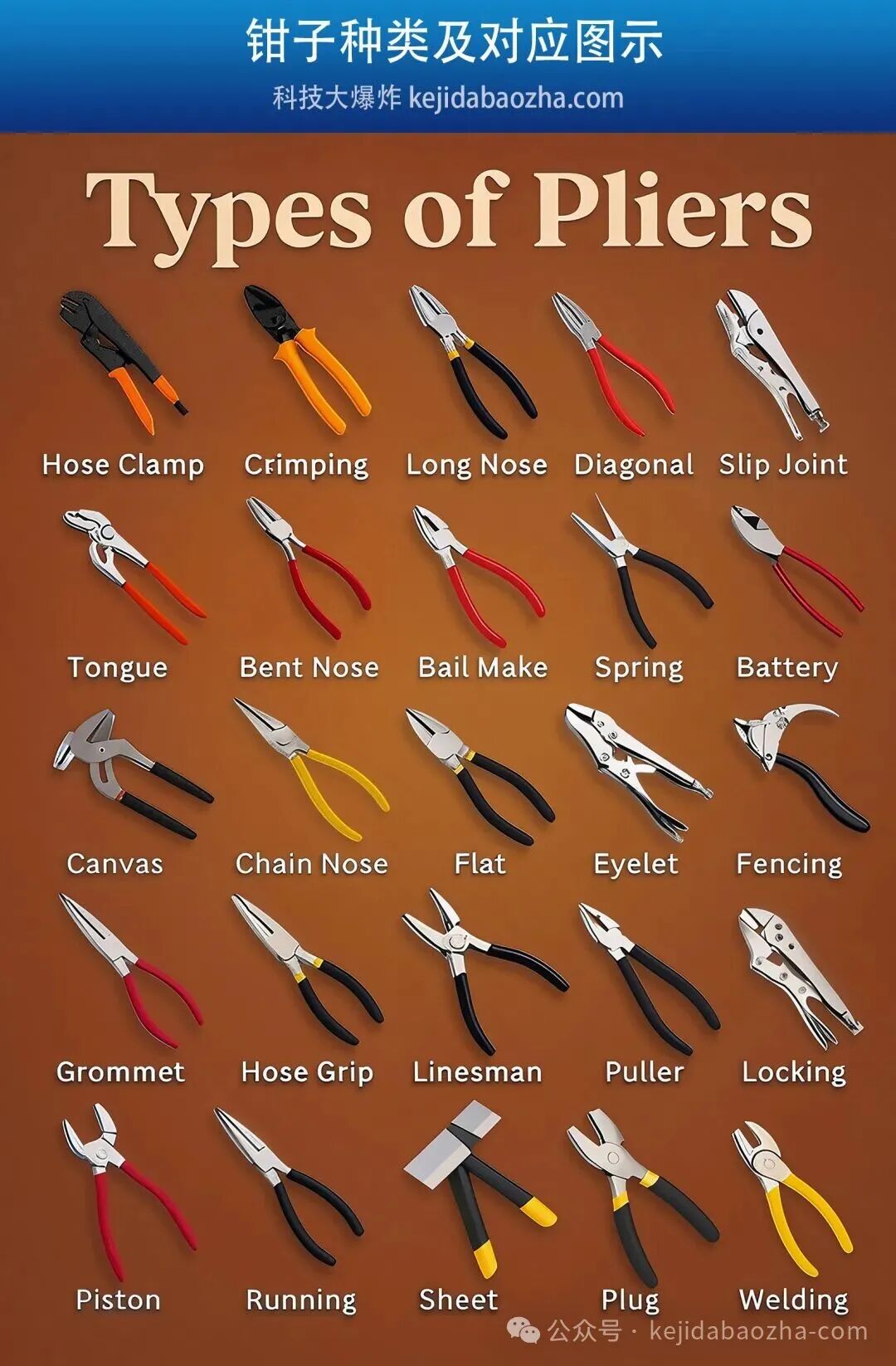 钳子种类及对应图示,各种钳子的中英文名称对照
钳子种类及对应图示,各种钳子的中英文名称对照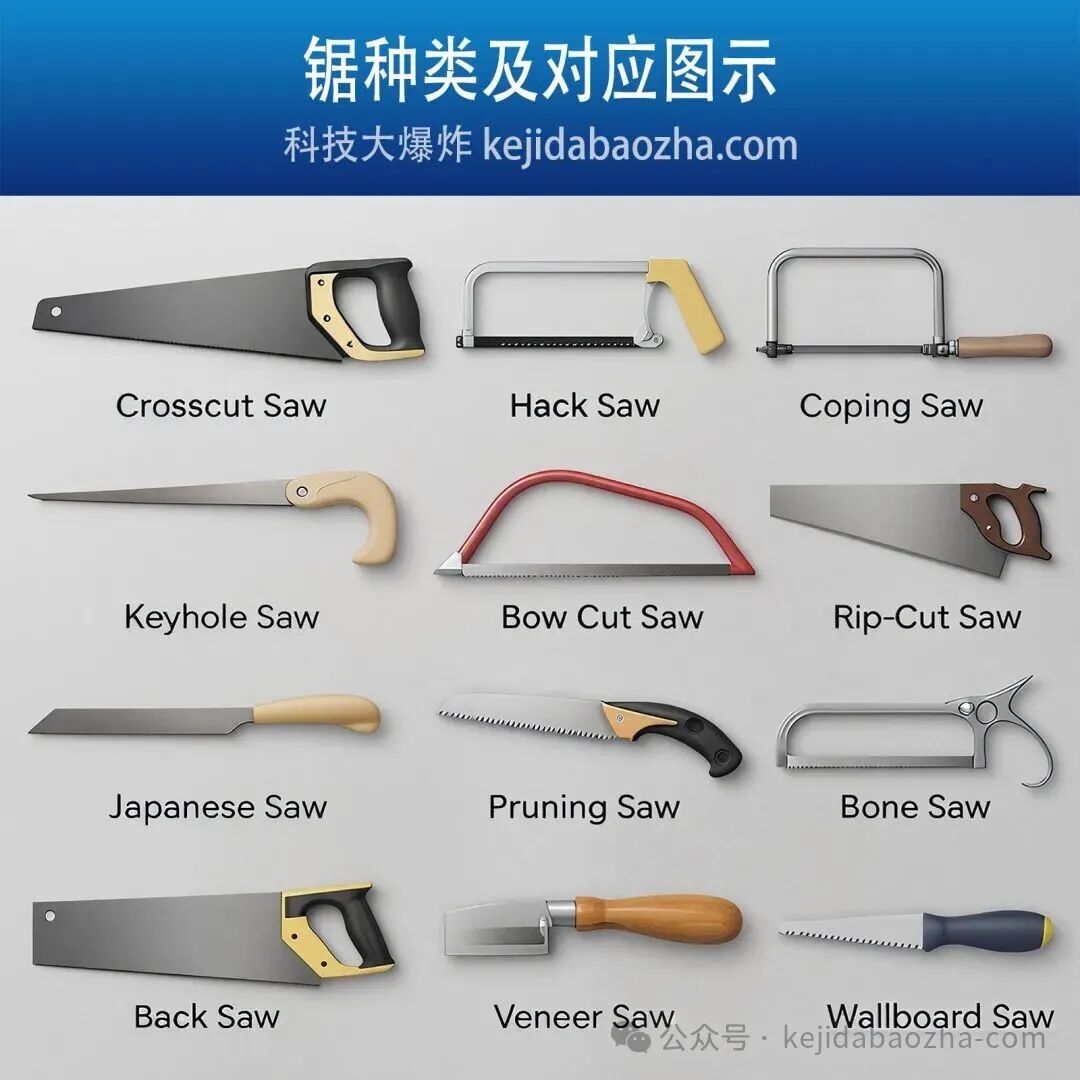 锯的种类及对应图示,各种锯的中英文名称对照
锯的种类及对应图示,各种锯的中英文名称对照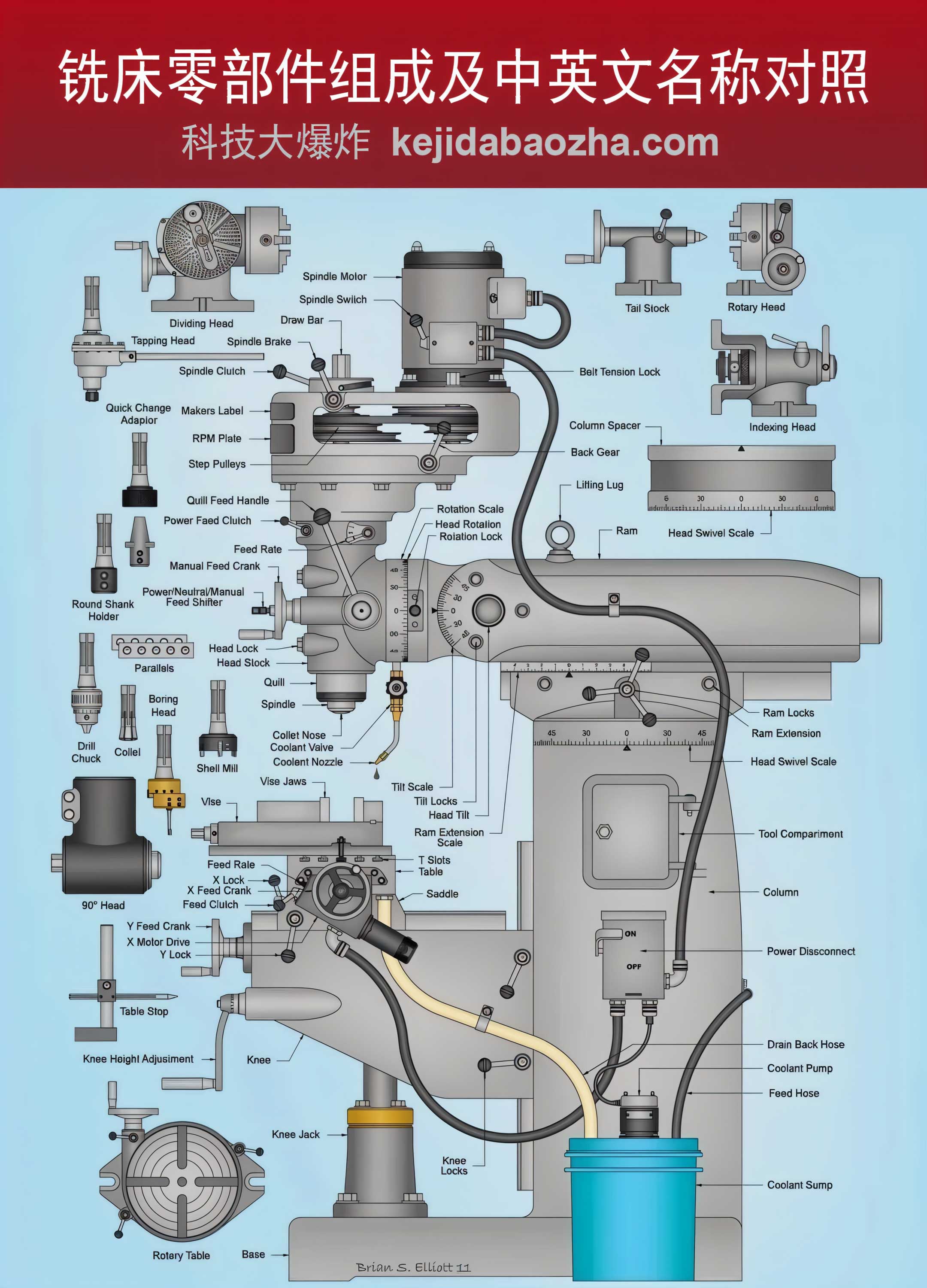 铣床(钻床)零部件组成及中英文名称对照,老外一张图,胜过十年书,一图看懂所有
铣床(钻床)零部件组成及中英文名称对照,老外一张图,胜过十年书,一图看懂所有 自动缓存链板输送机 利用两条链板来回搓动 实现工件缓存
自动缓存链板输送机 利用两条链板来回搓动 实现工件缓存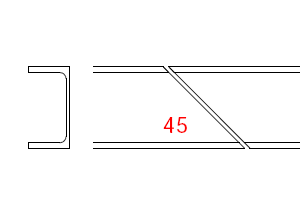 两端型钢(槽钢/工字钢/角钢)对接接口形状
两端型钢(槽钢/工字钢/角钢)对接接口形状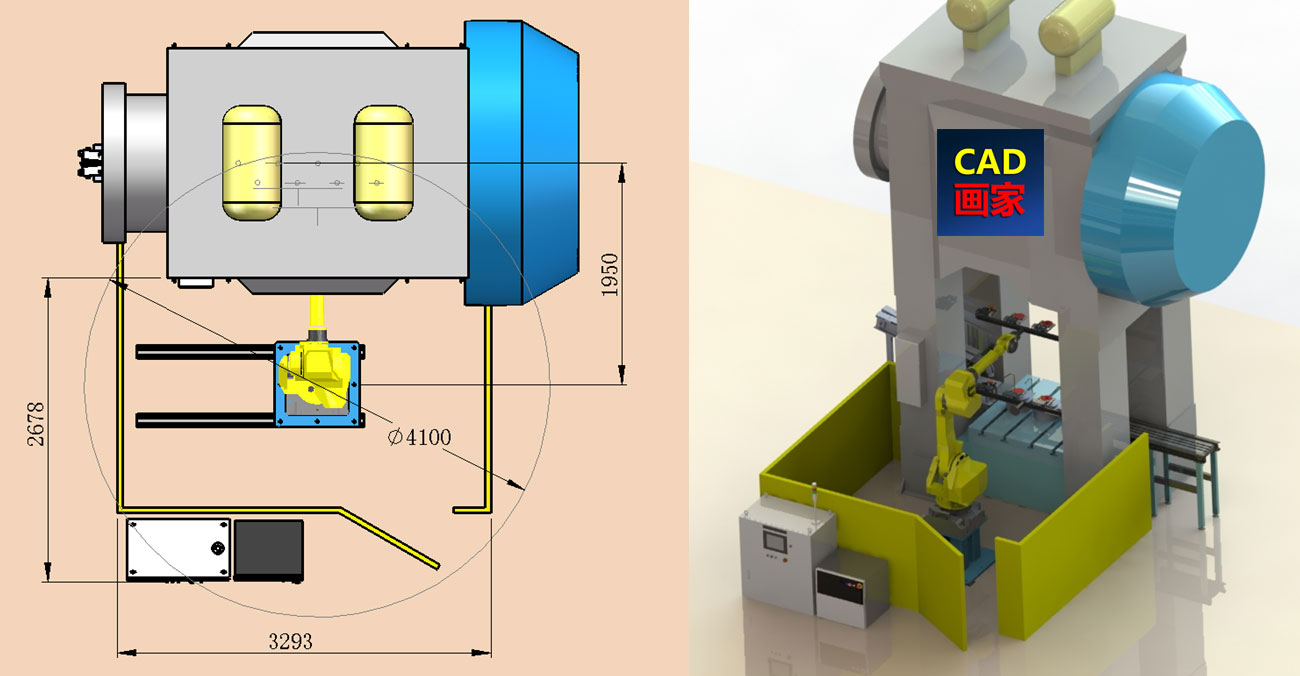 齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
齿轮锻造自动化生产线方案设计,如何利用机器人实现锻造自动化
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领) AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程
AutoCAD 2025 破解版+注册机 安装程序免费下载,附下载地址及安装教程 SolidWorks 2024 SP2.0 破解版免费下载及安装教程
SolidWorks 2024 SP2.0 破解版免费下载及安装教程 发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载
发那科机器人 FANUC 离线编程 动画仿真模拟软件 ROBOGUIDE V9 免费下载