-
 日本也开始弄虚作假了吗?FANUC机器人J3轴运动范围440°,是否存在参数虚标?
日本也开始弄虚作假了吗?FANUC机器人J3轴运动范围440°,是否存在参数虚标?
-
暗藏玄机,FANUC机器人负荷计算分析表详解,原来好多内容都被隐藏了,附文件保护破解密码
-
机器人拖链实际形状,中间段会耷拉下来,需设置支撑托板
-
KUKA机器人 KR 600 R2830 技术规格书
-
 KUKA机器人 KR600液压平衡缸结构组成及规格参数
KUKA机器人 KR600液压平衡缸结构组成及规格参数
-
机器人三接地,需要直接接地
-
机器人手腕部负载曲线图各线条含义及绘制方法,深入挖掘,会有不一样的发现
-
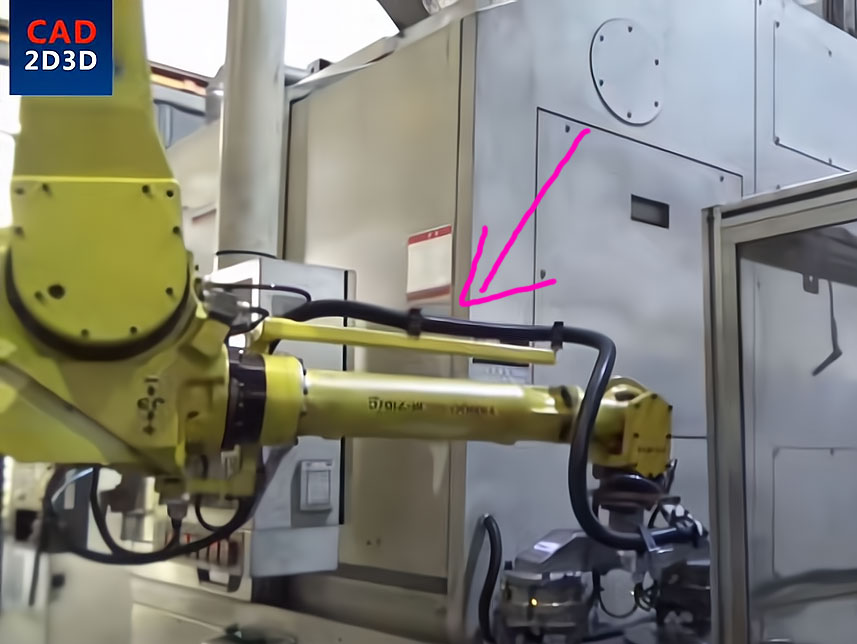 机器人管线包的固定方式,来自日本FANUC官方案例
机器人管线包的固定方式,来自日本FANUC官方案例
-
机器人J1轴后方有10°盲区,能从屁股后面取放件吗?
-
什么是6轴工业机器人奇异点?What are Singularities in a Six-Axis Robot Arm?
-
被坑了,机器人走不了直线,除了定位精度,原来还有重复路径精度
-
机器人J2轴为什么要加平衡缸?99%机械工程师选择了视而不见
-
工程师不看说明书,机器人买来直接干,连螺钉孔干什么用都不知道
-
库卡(KUKA)机器人液压平衡缸的构造、原理、技术参数
-
 波士顿动力 Stretch 机器人,适用于仓储货箱自动装卸
波士顿动力 Stretch 机器人,适用于仓储货箱自动装卸
-
 铝合金浇注双浇包(浇勺)设计
铝合金浇注双浇包(浇勺)设计
-
不同类型的3D视觉对室内外光线强度的要求
-
 发那科FANUC机器人 ROBOGUIDE 仿真模拟软件操作手册
发那科FANUC机器人 ROBOGUIDE 仿真模拟软件操作手册
-
3D视频播放器,rg3d文件格式,视频增加人机交互功能,可以实现视频内容的3D旋转、缩放、移动
-
FANUC全系列机器人选型手册,根据负载、运动半径、精度、安装方式和应用场合快速选择合适机器人
-
机器人能不能用来给机床开门,为什么很多人接受不了,非要给机床加个自动门?
-
库卡KUKA机器人选型确认书,机器人选型规格表下载,如何购买KUKA机器人
-
 FANUC机器人离线编程,三维直接生成路径,复杂零件快速生成打磨、焊接等路径程序
FANUC机器人离线编程,三维直接生成路径,复杂零件快速生成打磨、焊接等路径程序
CAD2D3D三维模型免费下载,用3D看世界,让自动化更简单
CAD2D3D,又名机械狗,专注于三维模型免费下载,分享工业机器人系统集成及自动化生产线相关技术。
