棘轮步进回转运动机构
w5 EALE LA
.t
f f
|
复位 |
o, R
S 3Gy
L;‘;—J_
上 -DC 一 一 - -村 |
人 回 苇 电磁 铁
ww 二 人
I s R,
人 一 一 | |
人
S R @
T 一 + 一 一
B 复位
— (ST
终止 信号
imrin=6secin-20 个 时 |
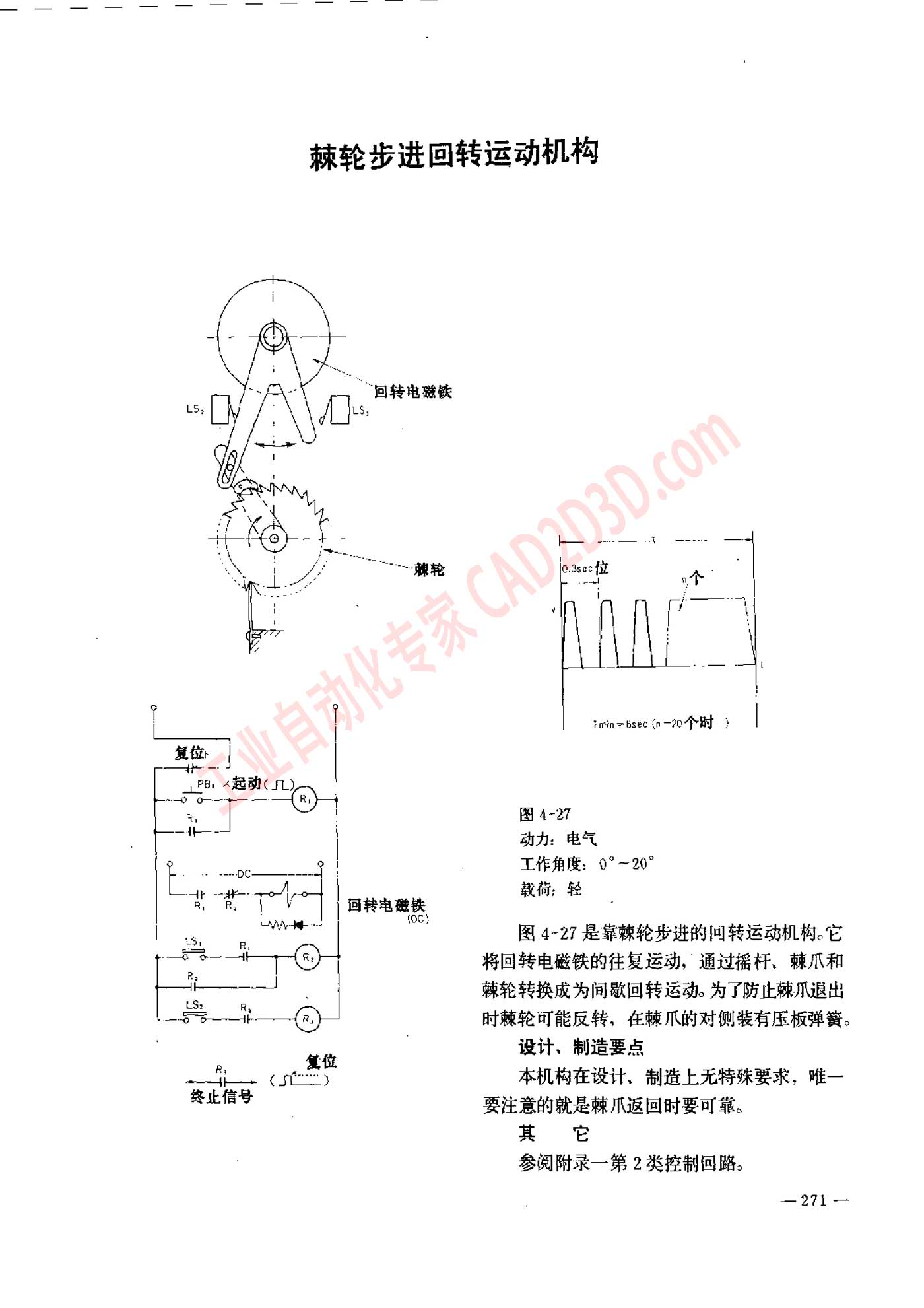
4-27
动力 : 电气
工作 角度 :0 "一 20”
载荷 , 轻
图 4-27 是 靠 球 轮 步 进 的 回转 运动 机 构 - 它
将 回转 电磁 铁 的 往复 运动 , 通 过 播 杆 、 棘 爪 和
款 轮 转换 成 为 间 鞭 回转 运动 。 为 了 防止 二 乐 退 出
时 未 轮 可 能 反 转 , 在 环 爪 的 对 侧 装 有 压板 弹 侦 。
设计 、 制 造 要 点
本 机 构 在 设计 、 制 造 上 无 特殊 要 求 , 唯 一
要 注意 的 就 是 坏 爪 返回 时 要 可 靠 。
其 它
参阅 附录 一 第 2 类 控制 回路 。
—271 —
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)