附
录 控制回路总论
将 执行 元 件 连接 到 顺序 回路 中 去 时 , 采 用 适当 的 中 间 装 置 是 必要 的 。 由 继电器 电路 控制 液压
抵 或 气缸 动作 时 , 必 须要 用 电磁 闪 , 由 电子 集成 电路 控制 电磁 铁 等 需要 较 大 功率 时 , 具 有 利
胃 功 率 放大 器 和 小 型 继电器 才 有 可 能 , 而 采用 小 型 逮 辑 继电器 的 控制 电路 , 也 要 先 起 动 大 的 磁力
开关 , 然 后 才能 使 大 型 电动 机 回转 。 即 使 是 采用 小 型 低压 高 速 陋 膜 元 件 的 气动 系统 , 在 控制 气缸
时 , 一 般 认 为 也 必须 用 增 压 冰 来 放大 功率 。 包 括 输入 信号 变换 器 在 内 的 这 些 变换 器 和 放大 器 等 中
间 装 置 列 于 表 4 。 另 外 , 输 出 动作 与 执行 元 件 的
关系 列 于 表 5 。
表 5 输出 动作 与 执行 元 件 的 关系
表 4 各 种 变换 器 和 放大 器
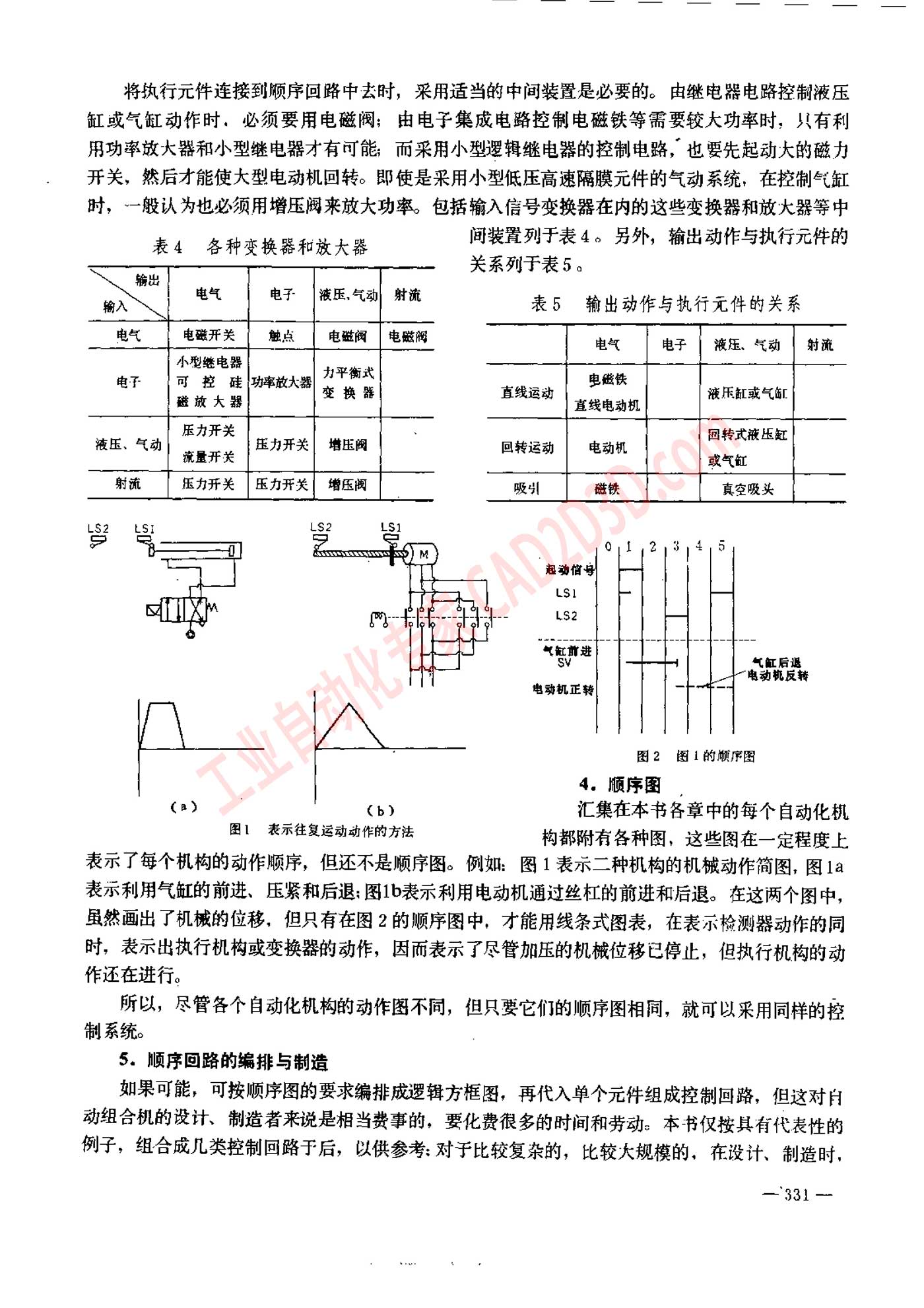
图 2 图 ! 的 顺序 图
4. B
(Ce) (b) 汇集 在 本 书 各 章 中 的 每 个 自动 化 机
图 1 表示 往复 运动 动作 的 方法 构 都 附 有 各 种 图 , 这 些 图 在 一 定 程度 上
表示 了 每 个 机 构 的 动作 上 顺序, 但 还 不 是 顺序 图 。 例 如 , 图 1 表示 二 种 机 构 的 机 械 动 作 简 图 , 图 1a
表示 利用 气缸 的 前 进 、 压 紧 和 后 退 : 图 lb 表示 利用 电动 机 通过 丝 杠 的 前 进 和 后 退 。 在 这 两 个 图 中 ,
虽然 画 出 了 机 械 的 位 移 , 但 只 有 在 图 2 的 顺序 图 中 , 才 能 用 线条 式 图 表 , 在 表示 检测 器 动作 的 同
时 , 表 示 出 热 行 宙 构 或 变换 器 的 动作 , 因 而 表示 了 尽管 加 压 的 机 械 位 移 已 停止 , 但 执行 机 构 的 动
作 还 在 进行 。
所 以 , 尽 管 各 个 自动 化 机 构 的 动作 图 不 同 , 但 只 要 它们 的 顺序 图 相同 , 就 可 以 采用 同样 的 控
制 系统 。
S$。 顺序 回路 的 编排 与 制造
如 果 可 能 , 可 按 顺 序 图 的 要 求 编排 成 逻辑 方 框 图 , 再 代入 单个 元 件 组 成 控制 回路 , 但 这 对 自
动 组 合 机 的 设计 、 制 造 者 来 说 是 相当 费事 的 , 要 化 费 很 多 的 时 间 和 劳动 。 本 书 仅 按 具 有 代表 性 的
例子 , 组 合成 几 类 控制 回路 于 后 , 以 供 参考 : 对 于 比较 复杂 的 , 比 较 大 规模 的 , 在 设计、 制造 时 ,
一 331 一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)