
 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)-
 兽爪兽装手爪猫娘手套cos手套手套兽装成品现货猫爪福瑞兽爪漫展 ¥93.8
兽爪兽装手爪猫娘手套cos手套手套兽装成品现货猫爪福瑞兽爪漫展 ¥93.8
-
 动物狂想曲乳胶狼人爪子手套cos密室鬼屋装扮道具万圣节毛绒手爪 ¥32
动物狂想曲乳胶狼人爪子手套cos密室鬼屋装扮道具万圣节毛绒手爪 ¥32
-
 黑科技爪子机械机器人手套高级感机械爪子手套鬼手道具手爪子可动 ¥44.8
黑科技爪子机械机器人手套高级感机械爪子手套鬼手道具手爪子可动 ¥44.8
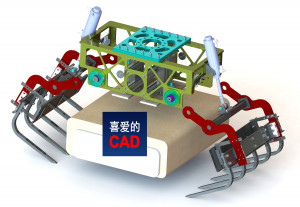 机器人码垛手爪3D模型免费下载,SolidWorks源文件,STEP通用格式
机器人码垛手爪3D模型免费下载,SolidWorks源文件,STEP通用格式 看到这样的手爪设计,我隐约有点担心,机械设计切忌能用就行
看到这样的手爪设计,我隐约有点担心,机械设计切忌能用就行 柔性关节手爪,不规则成袋土豆自动抓取,国外技术应用领先一步
柔性关节手爪,不规则成袋土豆自动抓取,国外技术应用领先一步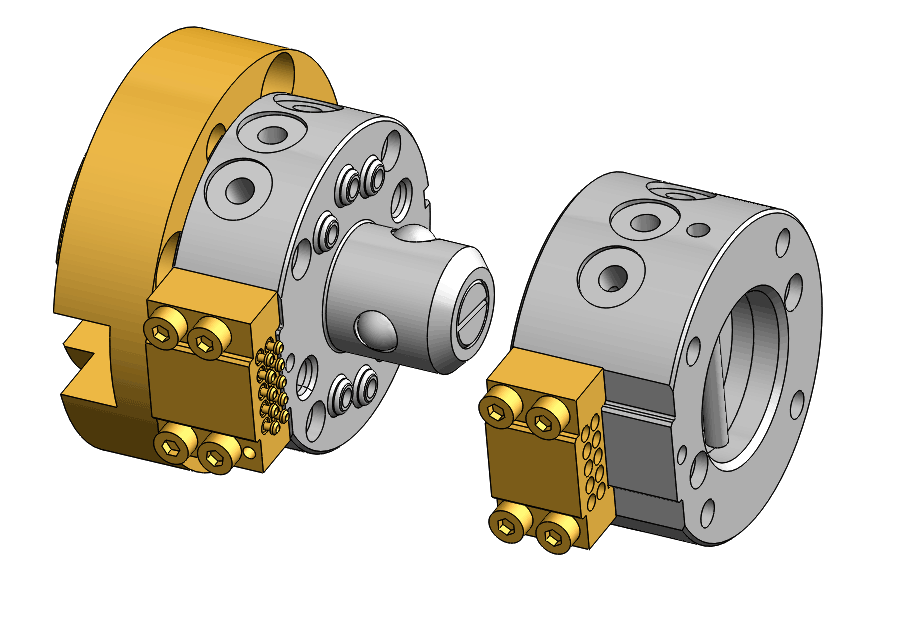 机器人快换工具应用案例,快速更换不同手爪,水电气等介质快速连接
机器人快换工具应用案例,快速更换不同手爪,水电气等介质快速连接- 雄克手爪选型方法和步骤,手爪夹持力计算公式
- 机加工自动化生产线方案设计大师,详细介绍生产线形式、料仓、物流转运、手爪、在线测量、工装夹具的结构形式和设计方法
- 方案大师:2.4.3 机器人、机械手、地轨、手爪等结构和原理详述
 平行开闭型手爪内部结构,手爪夹持力计算方法,手爪选型方法步骤
平行开闭型手爪内部结构,手爪夹持力计算方法,手爪选型方法步骤 机器人码垛手爪三维图下载,stp通用3D格式免费下载
机器人码垛手爪三维图下载,stp通用3D格式免费下载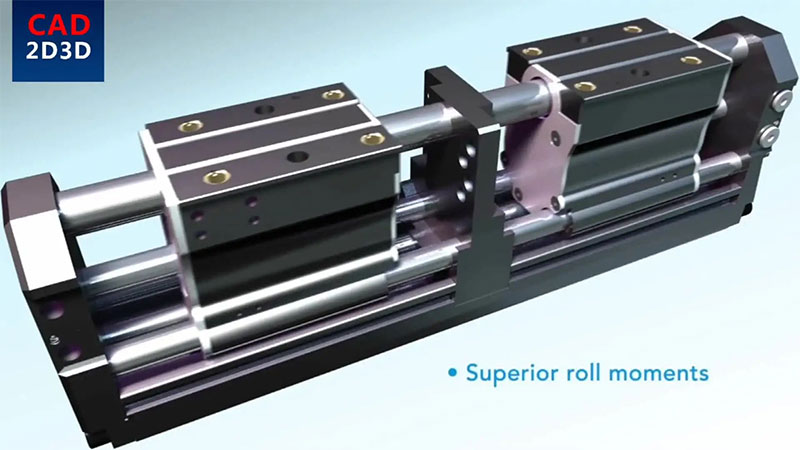 美国制造大行程平行开合气动手爪,驱动和同步装置非同寻常
美国制造大行程平行开合气动手爪,驱动和同步装置非同寻常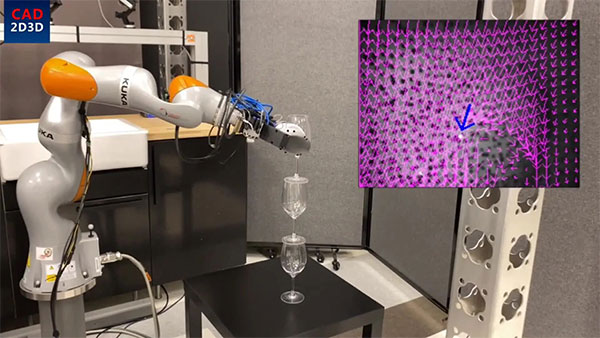 柔性气泡爪,内表面点阵,视觉识别点阵变化,自动反馈手爪状态
柔性气泡爪,内表面点阵,视觉识别点阵变化,自动反馈手爪状态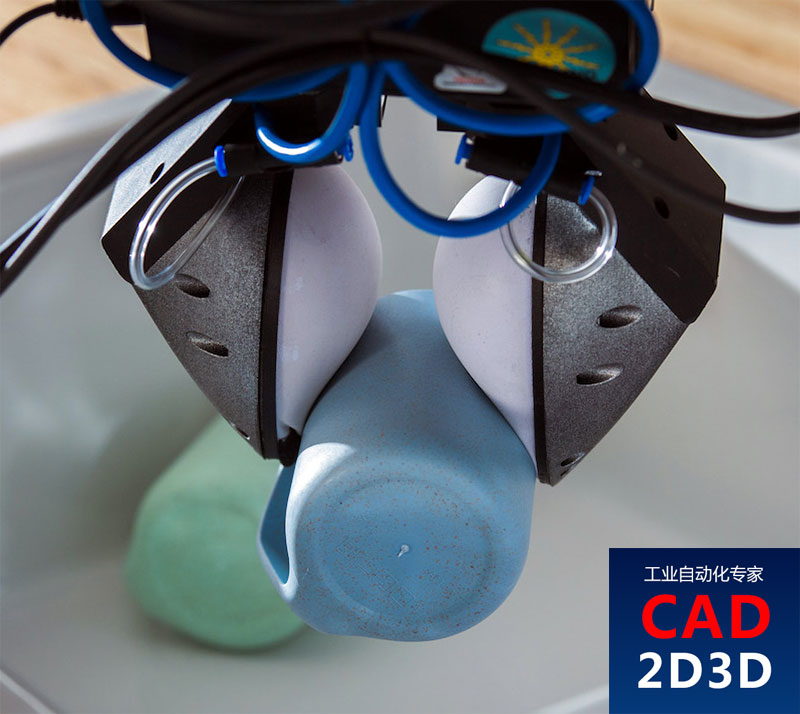 柔软的气泡式手爪,自动感知物体形状和夹持力,实现从杂乱无章的物品中准确抓取和放置
柔软的气泡式手爪,自动感知物体形状和夹持力,实现从杂乱无章的物品中准确抓取和放置 工业机器人工具坐标系定义和用法,切换坐标系实现多手爪快速切换
工业机器人工具坐标系定义和用法,切换坐标系实现多手爪快速切换- 机器人手爪手指受力变形分析,挠度计算方法,有限元分析应力及应变
 机器人手爪设计,摆动式手爪块,跟随表面,抓取更牢靠
机器人手爪设计,摆动式手爪块,跟随表面,抓取更牢靠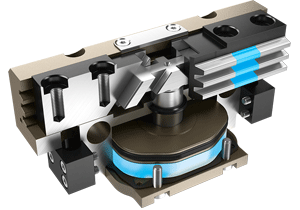 关节型手爪和平行开合式手爪结构详解及选用准则
关节型手爪和平行开合式手爪结构详解及选用准则- 500Kg至700Kg工件机器人搬运手爪(工具)的重量200Kg
 冲压自动取件手爪(弹簧自动卡紧 压机驱动)
冲压自动取件手爪(弹簧自动卡紧 压机驱动)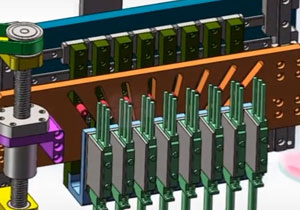 多位置同步收缩开合机构(手爪)
多位置同步收缩开合机构(手爪)- 发那科FANUC R-2000iC系列机器人末端执行器(手爪)及设备安装要求及方法
- 电永磁铁手爪 机器人/机械手手爪
 气动软关节手爪 软连接自适应工件 SolidWorks
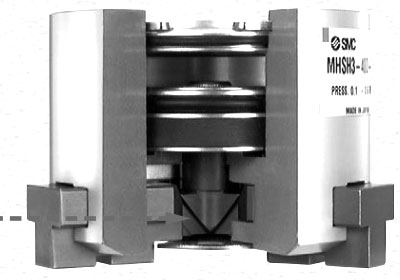
气动软关节手爪 软连接自适应工件 SolidWorks 带弹簧驱动的中心推板气动三爪气缸 适合机床上料手爪
带弹簧驱动的中心推板气动三爪气缸 适合机床上料手爪 V型手爪
V型手爪
与 手爪 相关商品 查看更多 >
与 手爪 相关搜索结果