组合直线运动的抓取和装入机构
组 合 直线 运动 的 抓 取 和 装 入 机 构
? w 气缸 1 . Lis(fi[ LS.
F RfLe
=< EIE_ LS,
= — IE :到 夹具
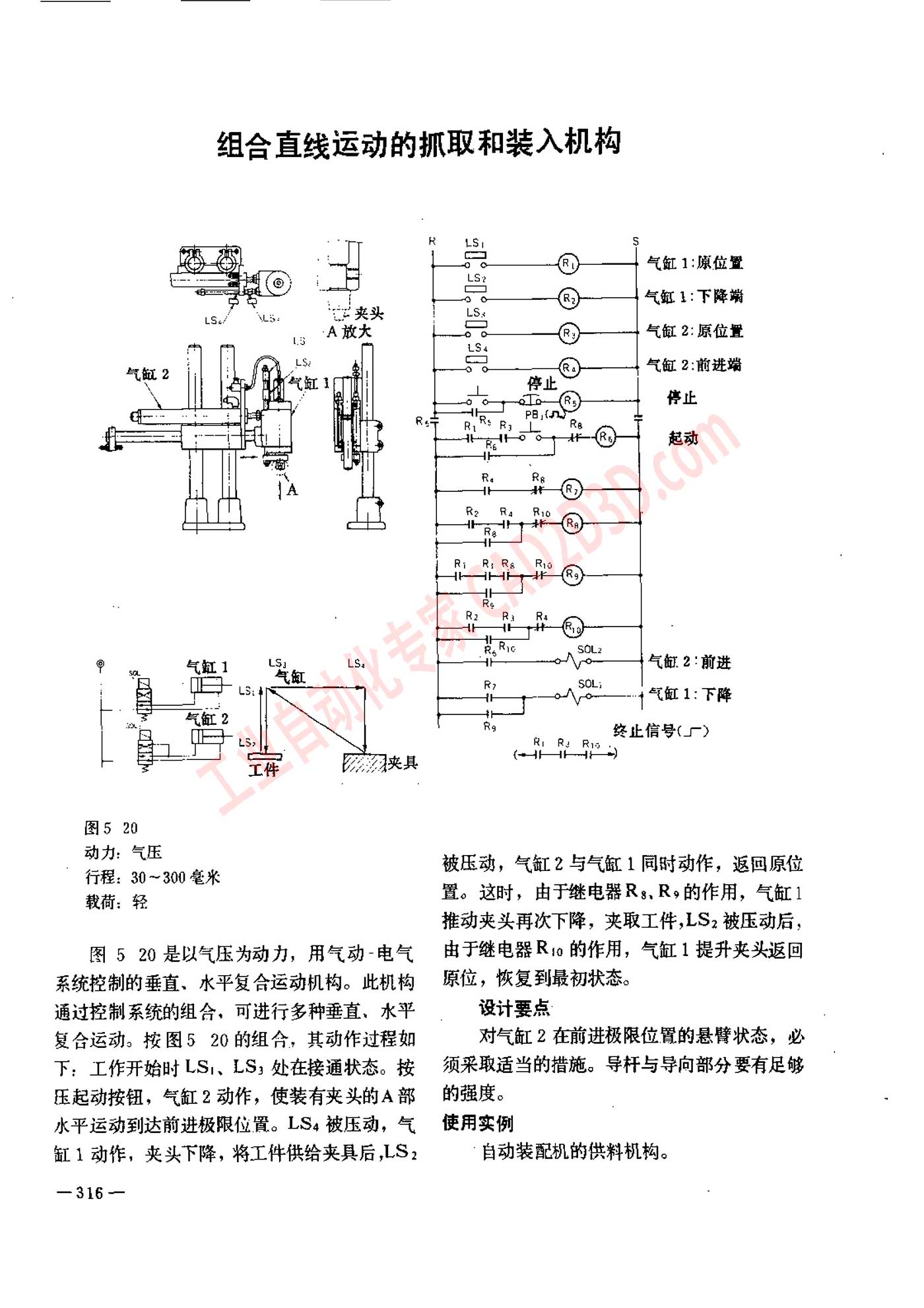
图 5 20
动力 : 气压
1778: 30~300 &KX
载荷 : 轻
图 5 20 是 以 气压 为 动力 , 用 气动 -电气
系统 控制 的 垂直 、 水 平复 合 运动 机 构 。 此 机 构
通过 控制 系统 的 组 合 , 可 进行 多 种 垂直 、 水 平
合 运动 。 按 图 5 20 的 组 合 , 其 动作 过 程 如
于, 工作 开始 时 LS,、LS 处 在 接 通 状态 。 按
秘 起 动 按钮 , 气 红 2 动作 , 使 装 有 夹 头 的 A 部
水 平 运动 到 达 前 进 极限 位 置 。LS4 被 压 动 , 气
所 1 动作 , 夹 头 下降 ,, 将 工件 供给 夹具 后 ,LS:
一 316 一
R S
Sy TR
气缸 2: 原 位 置
气 生 2: 前 进 端
气 疆 2 :前 进
R soL;
.__iz__—rfio-/\,.o—-d L1 TR
Rg
被 压 动 , 气 缸 2 与 气 低 1 同 财 动作, 返回 原 位
置 。 这 时 , 由 于 继电器 Rs. Rs 的 作用 , 气 纸 1
推动 夹 头 再 次 下 降 , 夹 取 工 件 , 工 Sz 被 压 动 后 ,
由 于 继电器 Rie 的 作用 , 气 和 缸 1 提升 光头 返回
蛛 位 , 恢 复 到 最 初 状 态 。
设计 要 点
对 气 纸 2 在 前 进 极限 位 置 的 悬臂 状态 , 必
须 采 取 适 当 的 措施 。 导 杆 与 导向 部 分 要 有 足够
的 强度 。
使 用 实例
-自动 装配 机 的 供 料 机 构 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)