三个直线运动的组合机构
三 个 直线 运动 的 组 合 机 构
本
rt A}
iy
工作
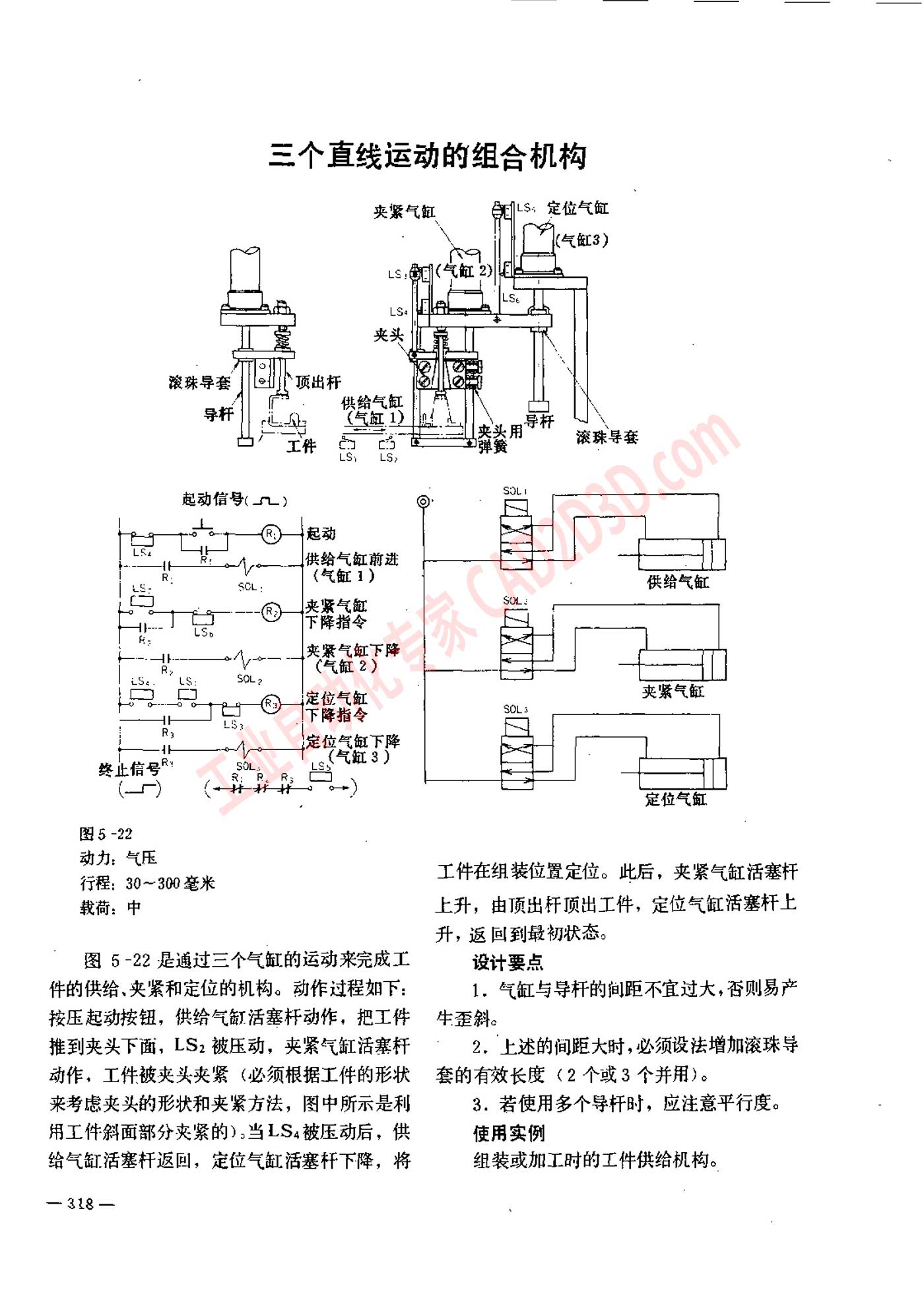
图 5 -22
动力 , 气压
行程 ,30 一 300 毫米
载荷 : 中
图 5-22 是 遂 过 三 个 气缸 的 运动 来 完成 工
件 的 供给 . 夹 紧 和 定位 的 机 构 。 动 作 过 程 如 下 :
按压 起 动 按钮 , 供 给 气 所 活塞 杆 动 作 , 把 工件
推 到 来头 下 面 ,LS: 被 压 动 , 夹 紧 气 缸 活塞 杆
动作 , 工 件 被 夹 头 夹 紧 〈 必 须根 据 工 件 的 形状
来 考虑 夹 头 的 形状 和 夹 紧 方法 , 图 中 所 示 是 利
恤 工 件 斜 面部 分 夹 紧 的 ) : 当 工 S4 被 压 动 后 , 供
给 气 币 活塞 杆 返回 , 定 位 气缸 活塞 杆 下 降 , 将
一 3 了 8 一
工件 在 组 装 位 置 定位 。 此 后 , 夹 紧 气缸 活塞 杆
上 升 , 由 顶 出 杆 项 出 工件 , 定 位 气缸 活塞 杆 上
升 , 返回 到 最 初 状 态 。
设计 要 点
1. 气 盾 与 导 杆 的 间距 不 宜 过 大 ,否则 易 产
HEH.
2, 上述 的 间距 大 时 , 必须 设法 增加 滚珠 导
套 的 有 效 长 度 〈2 个 或 3 个 并 用 ) 。
3. 若 使 用 多 个 导 杆 时 , 应 注意 平行 度 。
使 用 实例
组 装 或 加 工时 的 工件 供给 机 构 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)