棘爪和链条间歇回转运动机构
TR RN S 4% [8) Bk E) 465 E B LA
起 动 CL)》 复位 (Ti|
ao
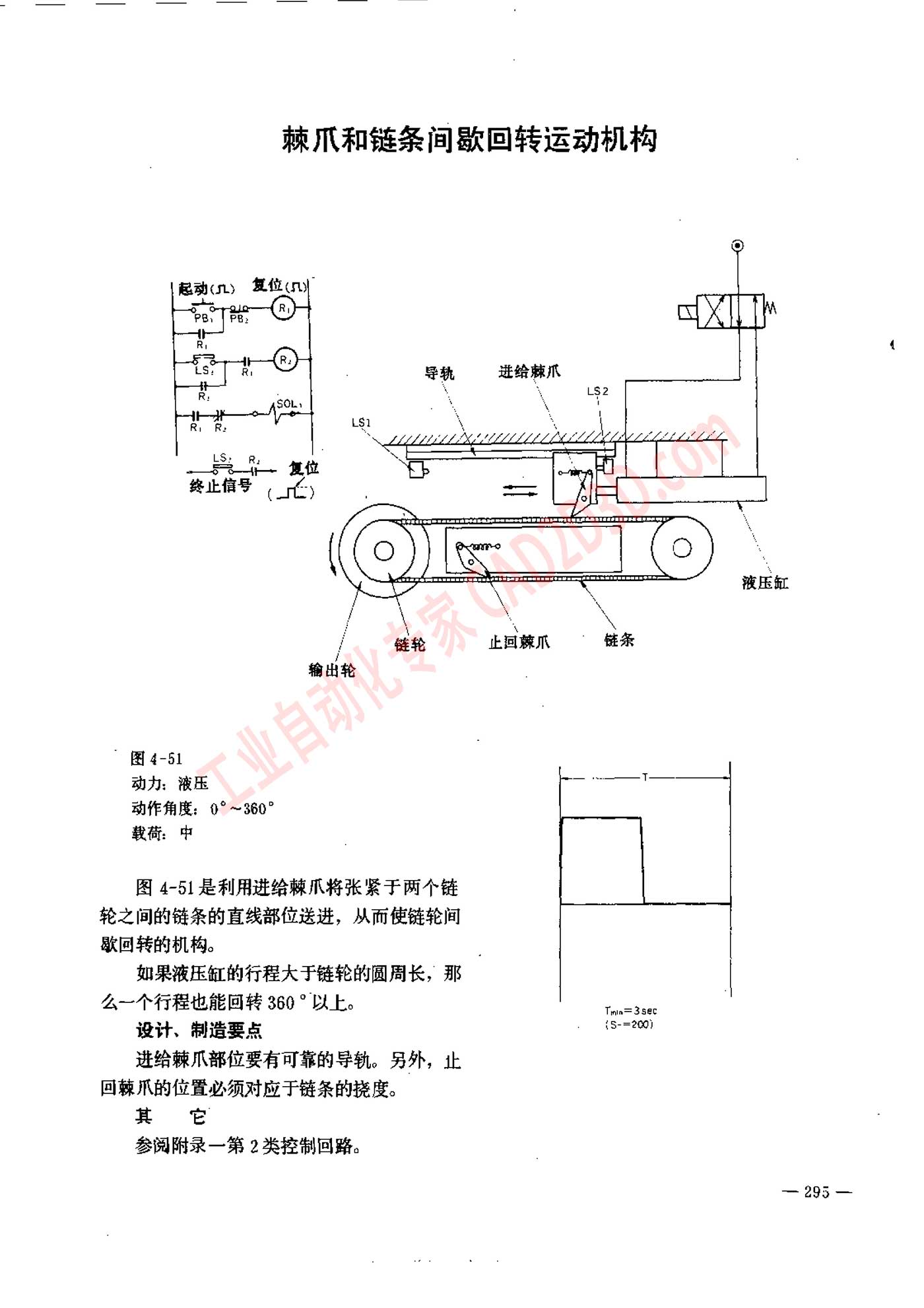
图 4-51
动力 : 波 压
动作 角度 , 人 0 一 360"”
载荷 : 中
图 4-51 是 利用 进 给 环 未 将 张 紧 于 两 个 链
轮 之 间 的 链条 的 直线 部 位 送 进 , 从 而 使 链 轮 间
BRI L. .
如 果 液 压 缸 的 行程 大 于 链 轮 的 圆周 长 , 那
么 一 个 行程 也 能 回转 360 " 以 上 。
Trn=3s€C
设计 、 制 造 要 点 4S-=200)
进 给 未 爪 部 位 要 有 可 靠 的 导轨 。 另 外 , 站
回 塌 处 的 位 置 必须 对 应 于 链条 的 找 度 。
其 它
参阅 附录 一 第 2 类 控制 回路 。
一 25 一
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)