气缸和进给爪矩形运动机构
气缸 和 进 给 爪 矩 形 运动 机 构
185 16 设计 要 点
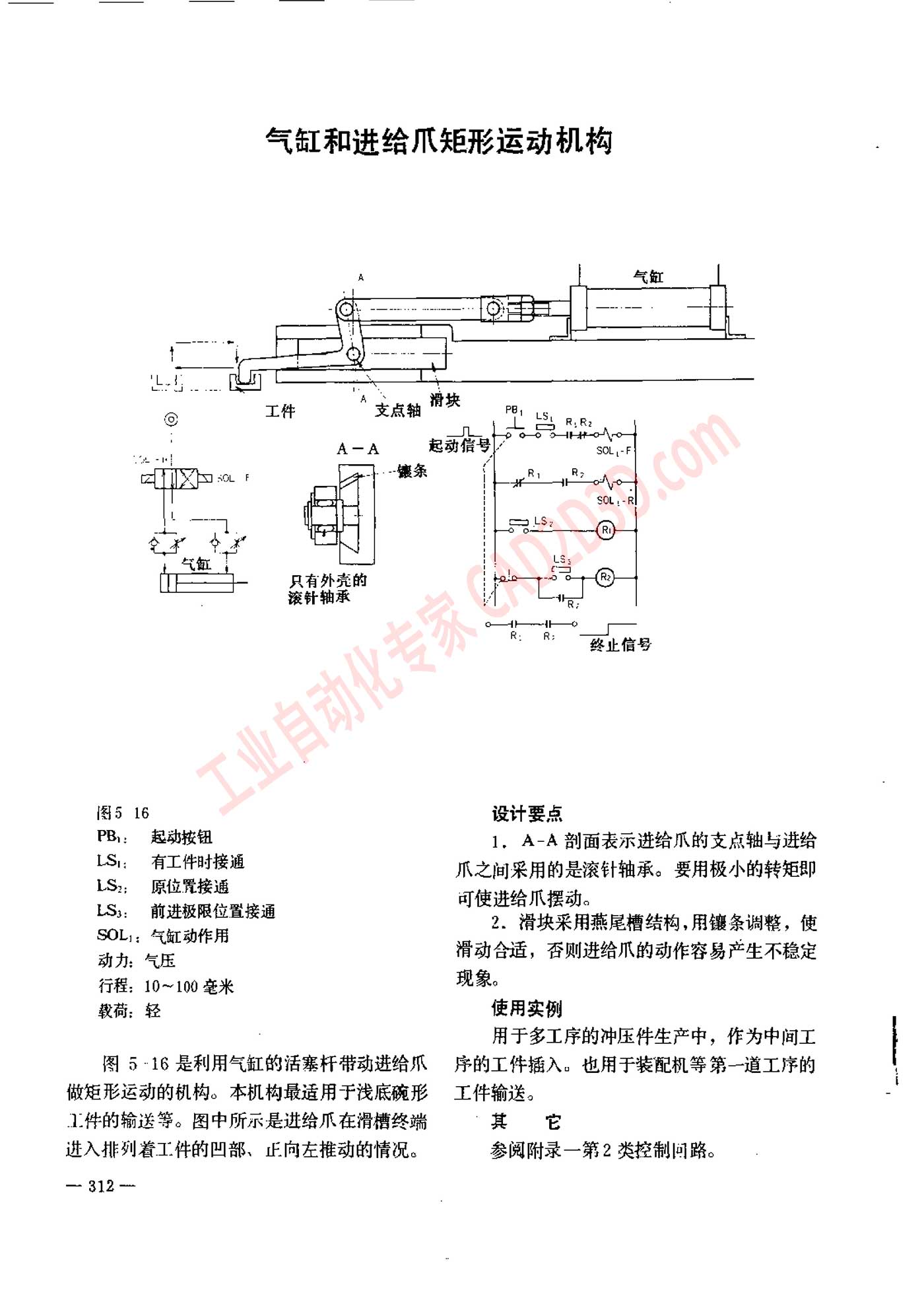
PB,, ”起动 按钮 1,A-A 剖面 表示 进 给 爪 的 支点 轴 与 进 给
LS. 有 工作 时 接 通 爪 之 问 采用 的 是 滚 针 轴 承 。 要 用 极 小 的 转 矩 即
本 新 了 位 M
e 2. WYCRIRIZHLEN, FH RN, fh
S 滑动 合适 , 否 则 进 给 外 的 动作 容易 产生 不 稳定
行程 ,10 一 100 毫米 xR
w8 使 用 实例
用 于 多 工序 的 冲压 件 生产 中 , 作 为 中 间 工
网 5 16 是 利用 气 红 的 活塞 杆 带动 进 给 乐 。 序 的 工件 插入。 也 用 于 装配 机 等 第 一 道 工 序 的
做 矩形 运动 的 机 构 。 本 机 构 最 适用 于 浅 底 碗 形 ”工件 输送 。
江 件 的 输送 等 。 图 中 所 示 是 进 给 爪 在 滑 槽 终端 €
进入 排列 着 工件 的 四 部 、 正 向 左 推动 的 情况 。 参阅 附录 一 第 2 类 控制 回路 。
=G 2
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)