立体传感器圆柱测量工具
工业 自动 化 专家 CAD2D3D.com
顺 时 针
沿 着 顺 时 针 方 向 显示 激光 的 标签 。
逆 时 针
沿 着 逆 时 针 方向 显示 激光 的 标签 。
无
不 显示 激光 的 标签 。
图 像 显 示 模 式
选择 在 进行 试验 时 将 检 出 结
显示 在 图 像 上 的 方式 。
2 维 图 像
显示 相机 拍摄 的 2 维 图 像 以 及 检 出 结果 。
激光 狭 终 图像 1
显示 激光 狭 缝 1 的 图 像 。
激光 狭 颖 图 像 2
显示 激光 狭 句 2 的 图 像 。
7.16.3 ”进行 试验
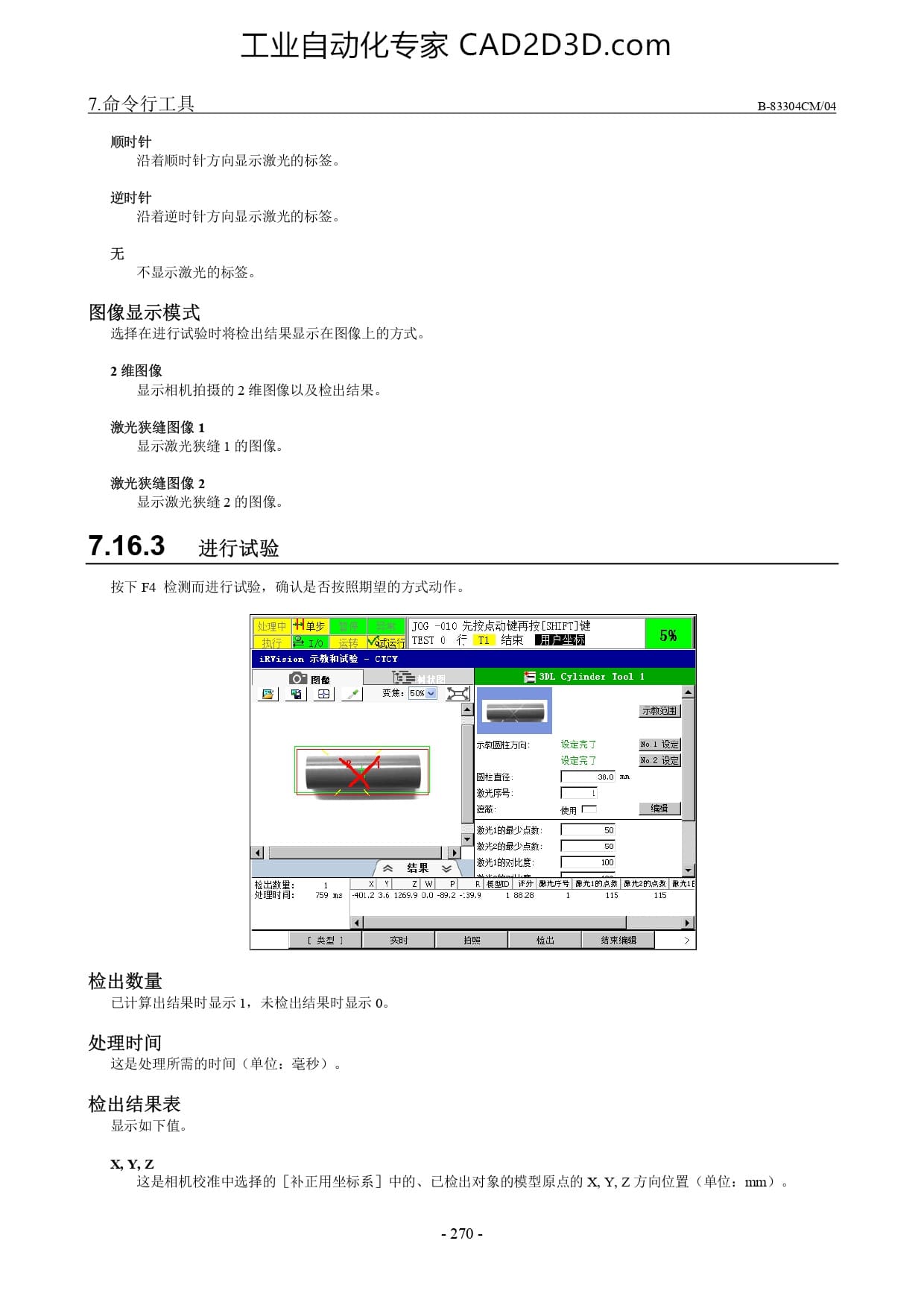
按 下 F4 检测 而 进行 试验 , 确 认 是 否 按照 期 望 的 方式 动作 。
B-83304CMI04
B e
[o T
| | 8]
Ld
A% [SHIFT] 键
J06 01
TEST 0 {7 TL S DEIRESE
ety
X[ 3]
7
—
Y[ WG = | R 65 5 | B AeEs A ALY
检 出 数量
己 计 算出 结果 时 显示 1, 未 检 出 结果 时 显示 0。
处 理 时 间
这 是 处 理 所 需 的 时 间 单位 : 毫秒) 。
检 出 结果 表
显示 如 下 值 。
XY,z
这 是 相机 校准 中 选择 的 【补正 用 坐标 系 ] 中 的 、 已 检 出 对 象 的 模型 局
检 出 数量 : 1
处 理 时 间 : 59 ms 40L2 36 12653 0.0
0
-270 -
1 115 115
点 的 X Y, 乙方 向 位 置 〈 单 位 : mm) 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)