测量值输出工具
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行
位 置 补 偿 后 的 误差
这 是 设 定 基 准 位 置 时 各 检 出 工具 检 出 的 位 置 、 和 通过 进行 试验 和 生产
像素 。
际 检 出 时 的 检 出 位 置 的 结合 误
7.12.3 ”视觉 参数
此 命令 行 工具 中 , 没 有 使 用 视觉 参
而 在 执行 时 从 机 器 人 的 程序 可 被 改写
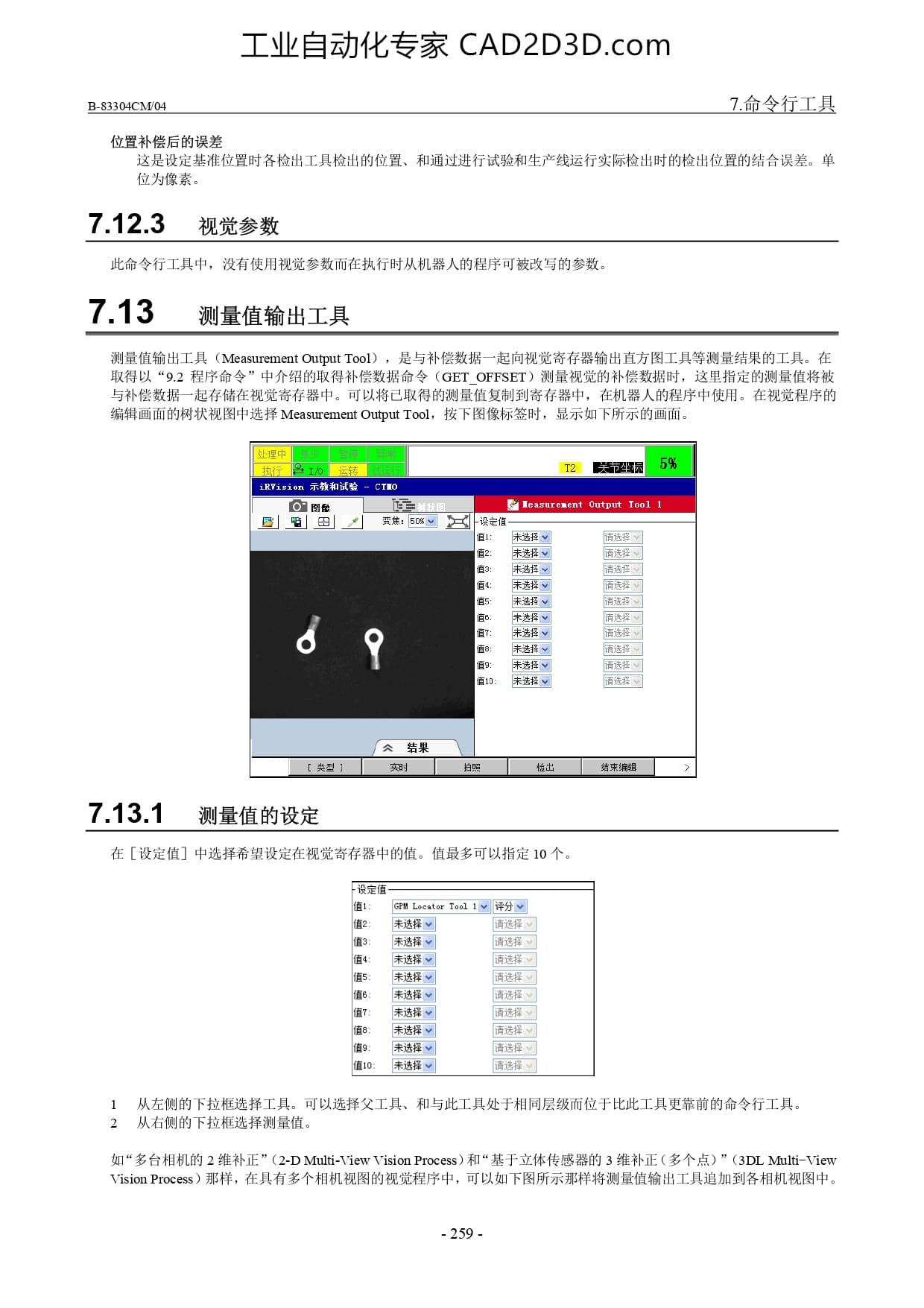
7.13 测量 值 输出 工具
测量 值 输出 工具 Measurement Output Tool) , 是 与 补偿 数据 一
0.2 程序 命令 ”中 介绍 的 取得 补偿 数据 命
据 一 人
存 器 : 。 可 以 将 已 取得
7.13.1 ”测量 值 的 设 定
在 [ 设 定 值 ] 中 选择 希望 设 定 在 视觉 寄存 器 中 的 值 。 值 最 多 可 以 指定 10 个 。
ET
1[G Locator Tosl 19][HH Y
UCES Bit
值 5,。 祭 过 择 司 |
B [FEEv
s FEEe|
e [k
& [FER]
值 8 ES
值 9 放 选 择 避 |
mo [FEEv|
1 “从 左 侧 的 下 拉 框 选择 工具 。 可 以 工具 、 和 与 此 工具 处 于 相同 层级 而 位
2 从 右 侧 的 下 拉 框 选择 测量 值 。
如 “多 人 台 相机 的 2 维 补正 ”(2-D Multi-View Vision Process) 和 "基于 立体 传感器 的 3 维 补正 (多 个 点 ) ”(3DL Multi-View
Vision Process ) 那样 , 在 具有 多 个 相机 视图 的 视觉 程序 中 , 可 以 如 下 图 所 示 那 则 量 值 输出 工具 追加 到 各 相机 视图 中 。
-259 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)