测量值输出工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工 具 B-83304CM/04
GPI Locator Tool 1
| “上 国 Histogran Tool 1
# Neasurenent Output Tool 1
Camera View 2
GPN Locator Tool 2
|- lHistogran
# Measurement Output Tool 2
12
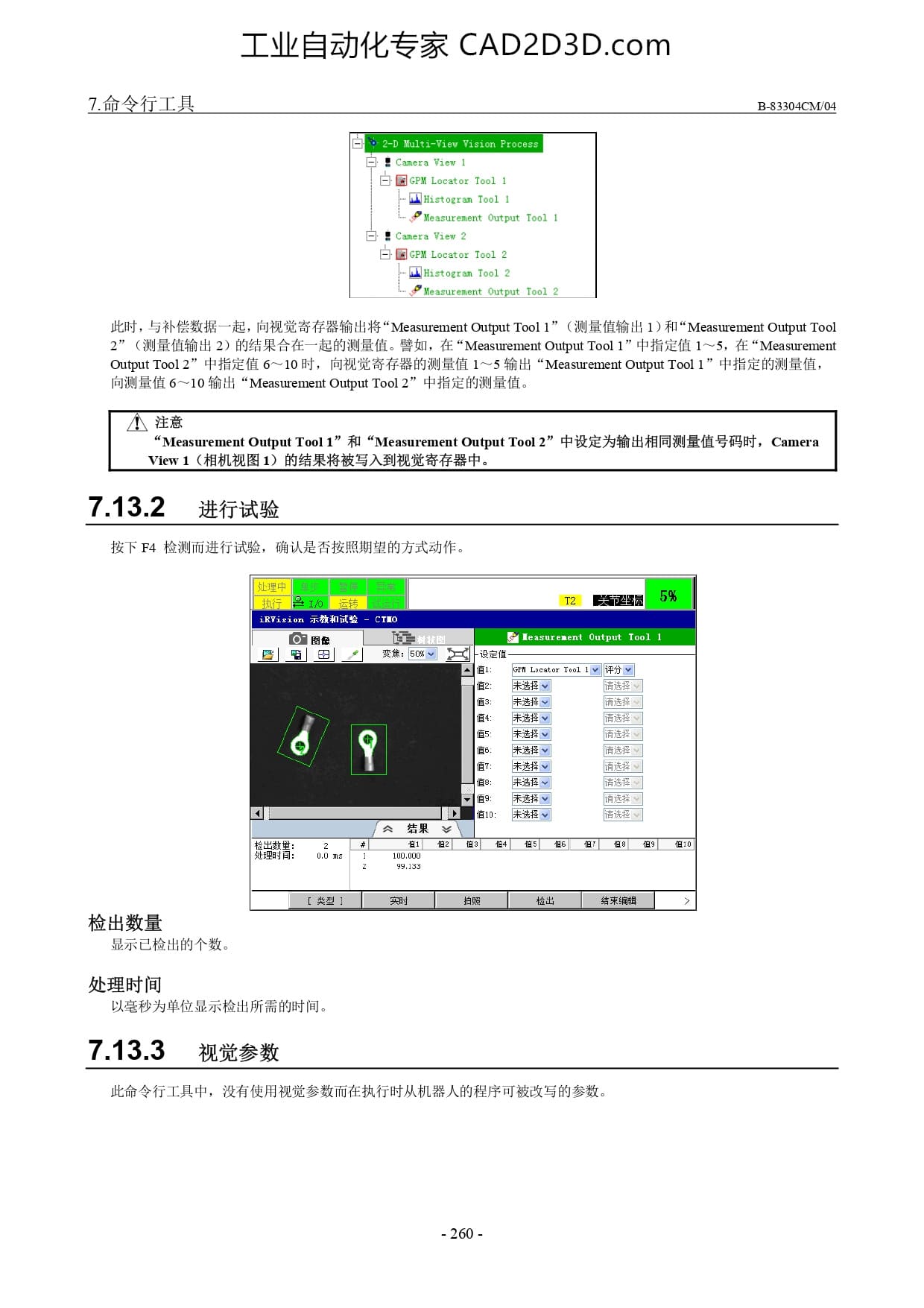
此 时 , 与 补偿 数据 一 起 , 向 视觉 寄存 “Measurement Output Tool 1”( 测 量 值 输 出 1) 和 “Measurement Output Tool
2” (测量 值 输出 2) 的 结果 合 在 一 。 譬如 , 在 “Measurement Output Tool 1” 中 指定 值 1 一 5, 在 “Measurement
Output Too12” 中 指定 值 6 一 10 时 , 向 视觉 存 器 的 测量 值 1 一 5 输出 “Measurement Output Tool 1” 中 指定 的 测量 值 ,
向 测量 值 6 一 10 输出 “Measurement Output Tool 2” 中 指定
注意
“Measurement Output Tool1” 和 “Measurement Output Tool2” 中 设 定 为 输出 相同 测量 值 号 码 时 ,Camera
View 1 (相机 视图 1) 的 结果 将 被 写 入 到 视觉 寄存 器 中 。
7.13.2 ”进行 试验
按 下 F4 检测 而 进行 试验 , 确 认 是 否 按照 期 望 的 方式 动作 。
发 纪 数 量 :。。2 EECDRECSEECIRRECSRRCGIRECGRRCGREEC9RRECED |
处 理 时 间 : 0.0 ms 1
[类 型 ] 50 的 由 检 出 SR >
检 出 数量
显示 已 检 出 的 个 数 。
处 理 时 间
以 毫秒 为 单位 显示 检 出 所 需 的 时 间 。
7.13.3 ”视觉 参数
此 命令 行 工具 中 , 没 有 使 用 视觉 参数 而 在 执行 时 从 机 器 人 的 程序 可 被 改写 的 参 交
-260 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)