位置补正和抓取偏差补正、固定相机和固定于机器人的相机
工业 自动 化 专家 CAD2D3D.com
2 关于 视觉 系统 B-83304CM/04
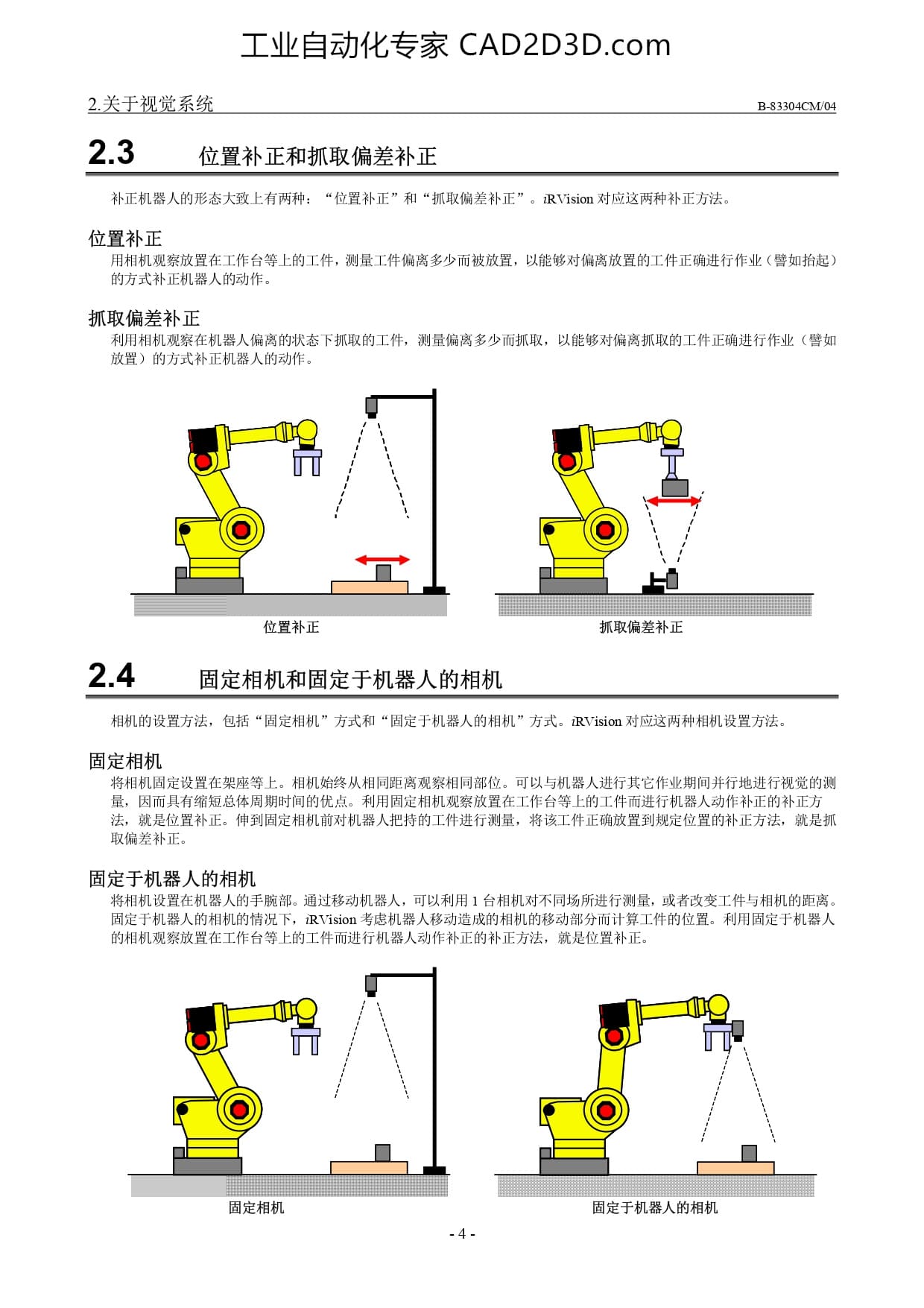
2.3 位 置 补正 和 抓 取 偏差 补正
补正 机 器 人 的 形态 大 致 上 有 两 种 : “位 置 补正 ”和 “ 抓 取 偏差 补正 ”。 退 Vision 对 应 这 两 种 补正 方法 。
位 置 补正
用 相机 观察 放置 在 工作 台 等 上 的 工件 , 测量 工件 偏离 多 少 而 被 放 冒 , 以 能 够 对 偏离 放置 的 工件 正确 进行 作业 〈 艾 如 抬 起 》
的 方式 补正 机 器 人 的 动作 。
抓 取 偏差 补正
利用 相机 观察 在 机 器 人 偏离 的 状态 下 抓 取 的 工件 , 测 量 偏离 多 少 而 抓 取 , 以 能 够 对 偏离 抓 取 的 工件 正确 进行 作业 《和 警 如
放置 ) 的 方式 补正 机 器 人 的 动作 。
位 置 补正 抓 取 偏差 补正
2.4 固定 相机 和 固定 于 机 器 人 的 相机
相机 的 设置 方法 , 包 括 “ 固 定 相机 ”方式 和 “固定 于 机 器 人 的 相机 ”方式 。 让 Vision 对 应 这 两 种 相机 设置 方法 。
定 相机
将 相机 固定 设置 在 架 座 等 上 。 相 机 始终 从 相同 距离 观察 相 |
o
同 部 位 。 可 以 与 机 器 人 进行 其 它 作 业 期 间 并 行 地 进行 视觉 的 测
量 , 因 而 具有 体 周 期 时 间 的 优点 。 利 用 固定 相机 观察 放置 在 工作 台 等 上 的 工件 而 进行 机 器 人 动作 补正 的 补正 方
法 , 就 是 位 置 补 正 。 伸 到 固定 相机 前 对 机 器 人 把 持 的 工件 进行 测量 , 将 该 工件 正确 放置 到 规定 位 置 的 补正 方法 , 就 是 抓
取 偏 差 补 正 。
固定 于 机 器 人 的 相机
将 相机 设置 在 机 器 人 的 手腕 部 。 通 过 移动 机 器 人 , 可 以 利用 1 台 相机 对 不 同 场所 进行 测量 ,或 者 改变 工件 与 相机 的 距离 。
固定 于 机 器 人 的 相机 的 情况 下 , 妇 Vision 考虑 机 器 人 移动 造成 的 相机 的 移动 部 分 而 计算 工件 的 位 置 。 利 用 固定 于 机 器 人
的 相机 观察 放置 在 工作 台 等 上 的 工件 而 进行 机 器 人 动作 补正 的 补正 方法 , 就 是 位 置 补正 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)