3 维广域传感器斑点群检出工具
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7.
处 理 时 间
显示 检 出 所 需 的 时 间 〈 单 位 毫秒 ) 。
检 出 结果 表
显示 如 下 值
=
15
a1
-
—
yund
Vt. Hz
这 是 相机 图 像 上 的 项 点 位 置 。
XY,z
这 是 检 出 位 置 〈 单 位 : mmy) 。
评分
这 是 以 o 一 100 的 值 表述 检 出 位 置 的 己 高 度 的 评分 , 乙 高 度 与 3 维 广 域 传 感 器 3 维 补正 的 取得 范围 的 Z 的 最 大 值 相 等
或 者 大 于 此 值 时 评分 为 100, 与 最 小 值 相 等 或 小 于 此 值 时 评分 为 0。
附近 的 点 数
这 是 存在 于 局 部 项 点 的 附近 《〔 项 点 搜索 范围 ) 的 3 维 点 数 。
7.35.3 ”视觉 参数
可 以 将 此 命令 行 工具 的 设 定 参数 中 的 如 下 参数 指定 为 视觉 参数 , 在 执行 时 从 机 器 人 的 程序 进行 改写 。 有 关 视 觉 参 数 的 详
情 , 请 参阅 “8.1 视觉 参数 ”以 及 “9.2.2.8 设 定 视觉 参数 命令 ”。
顶点 搜索 范围
指定 1 一 192 间 的 值 。
附近 的 点 数
作为 【项 :
索 范 围 ] 设 定 了 及时, 指定 1 一 (2R+1)^2-1 间 的 值 。
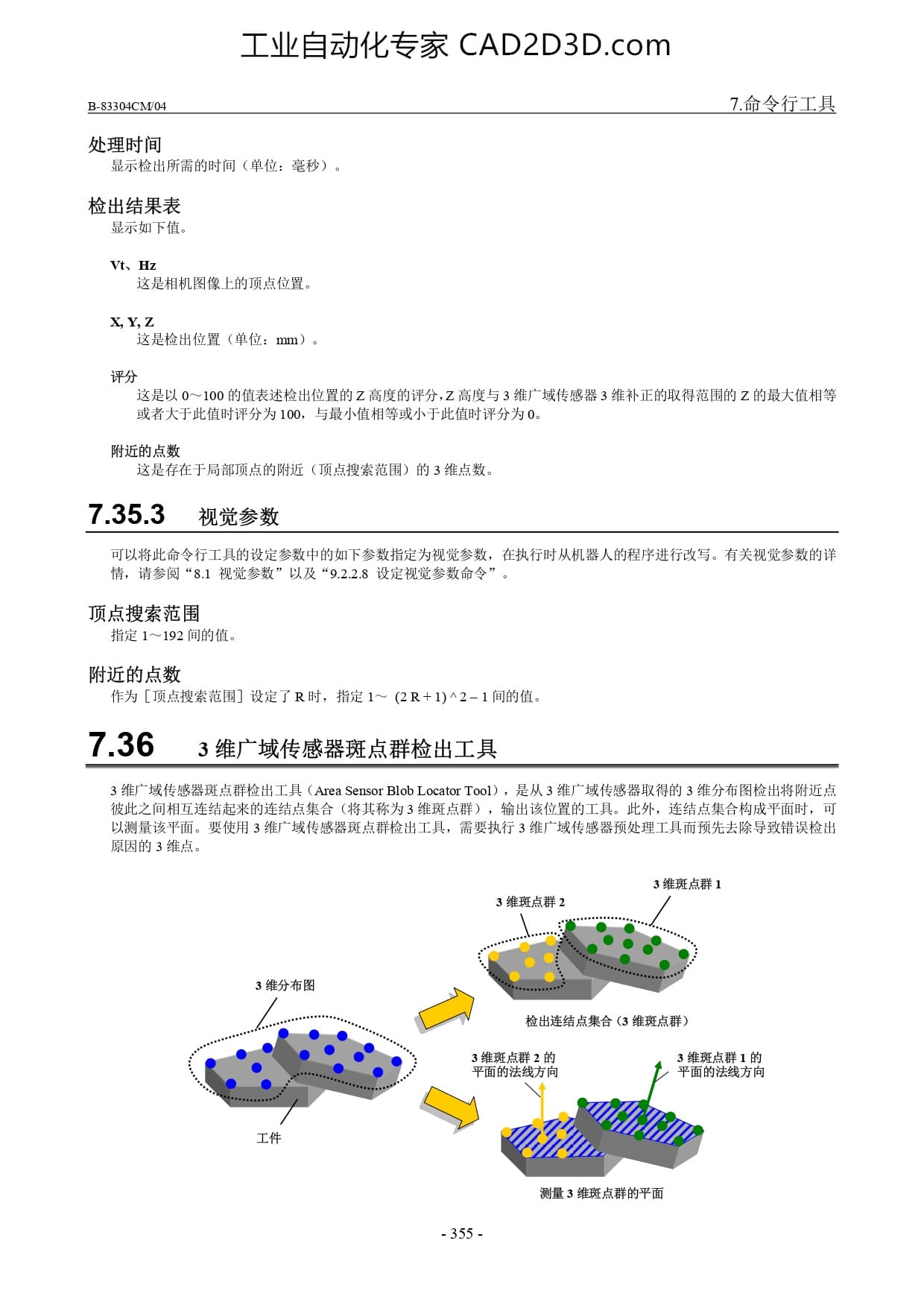
7.36 。 3 维 广 域 传感器 斑点 群 检 出 工具
检 出 工具 (Area Sensor Blob Locator Tool) , 是 从 3 维 广 域 传 感 器 取得 的 3 维 分 布 图 检 出 将 附近 点
3 维 广 域 传感器 现
彼此 之 间 相 互 连 结 起 来 的 连结 点 集合 〈 将 其 称 为 3 维 斑点 群 ) , 输 出 该 位 置 的 工具 。 此 外 , 连 结 点 集合 构成 平面 时 , 可
以 测量 该 平面 。 要 使 用 3 维 广 域 传感器 斑点 群 检 出 工具 , 需 要 执行 3 维 广 域 传感器 预 处 理工 具 而 预先 去 除 导 致 错误 检 出
检 出 连结 点 集合 〈3 维 斑点 群 )
3 维 斑点 群 2 的 3 维 斑点 群 1 的
平面 的 法 线 方向 平面 的 法 线 方向
测量 3 维 班 点 群 的 平面
-355 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)