安全装置 机器人的停止方法
工业 自动 化 专家 CAD2D3D.com
4 安全 装置
B-80687CM/1
“平稳 急 停 功 能 ”可 选 购 项
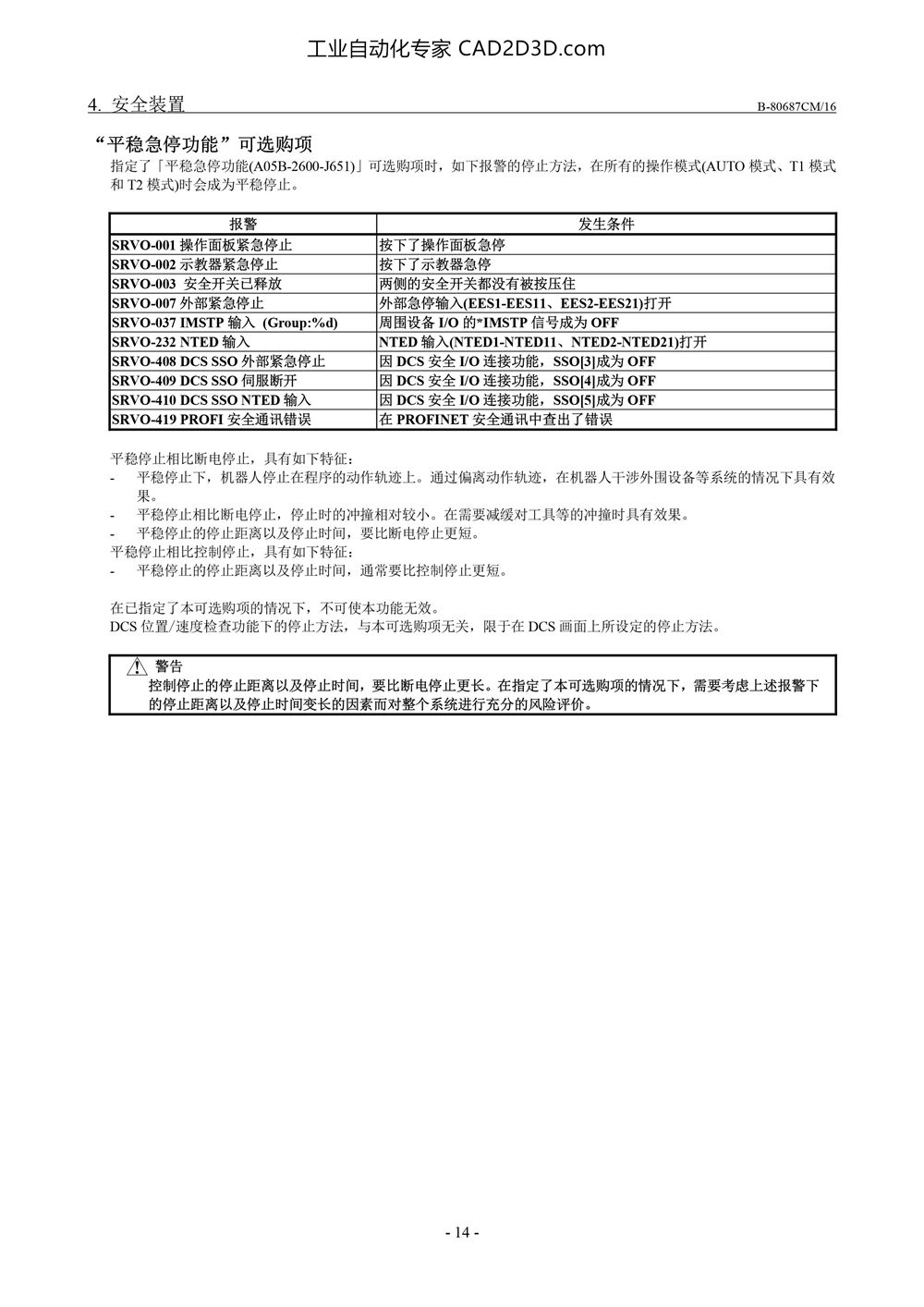
此 定 了 「 平 稳 急 停 功 能 (A05B-2600-J651)」 可 选 购 项 时 , 如 下 报警 的 停止 方法 , 在 所 有 的 操作 模式 (AUTO 模式 、T1 模式
和 T2 模式 ) 时 会 成 为 平稳 停止 。
平稳 停止 相 比 断 电 停止 , 具 有 如 下 特征 :
平稳 停止 下, 机 器 人 停止 在 程序 的 动作 轨迹 上 。 通 过 偏离 动作 轨迹 , 在 机 器 人 :
果 。
小 围 设备 等 系统 的 情况 下 具有 效
享 止 相 比 断 电 停止 , 停 止 时 的 冲撞 相对 较 小 。 在
- “平稳 停止 离 以 及 停止 , 要 比 断 电 停止
字 制 停止 , 具 有 如 下 特征 ;
的 停止 距离 以 及 停止 时 间 , 通
要 减缓 对 工具 等 的 冲撞 时 具有 效果 。
要 比 控制 停止 更 短 。
在 已 指定 了 本 可 选 购 项 的 情况 下 , 不 可 使 本 功能 无 效 。
DCS 位 置 /速度 检查 功能 下 的 停止 方法 , 与 本 可 选 购 项 无 关 , 限 于 在 DCS 画面 上 所 设 定 的 停止 方法 。
的 停止 距离 以 及 停止 时 间 变 长 的 因素 而 对 整个 系统 进 :
w14
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)