作用于机器人机座的力和力矩 断电停止时从输入停止信号到机器人停止之前的时间以及惯性移动角度
1. 搬运 和 安装
图 1.2.1(bD、 表
T
=
自动 化 专家 CAD2D3D.com
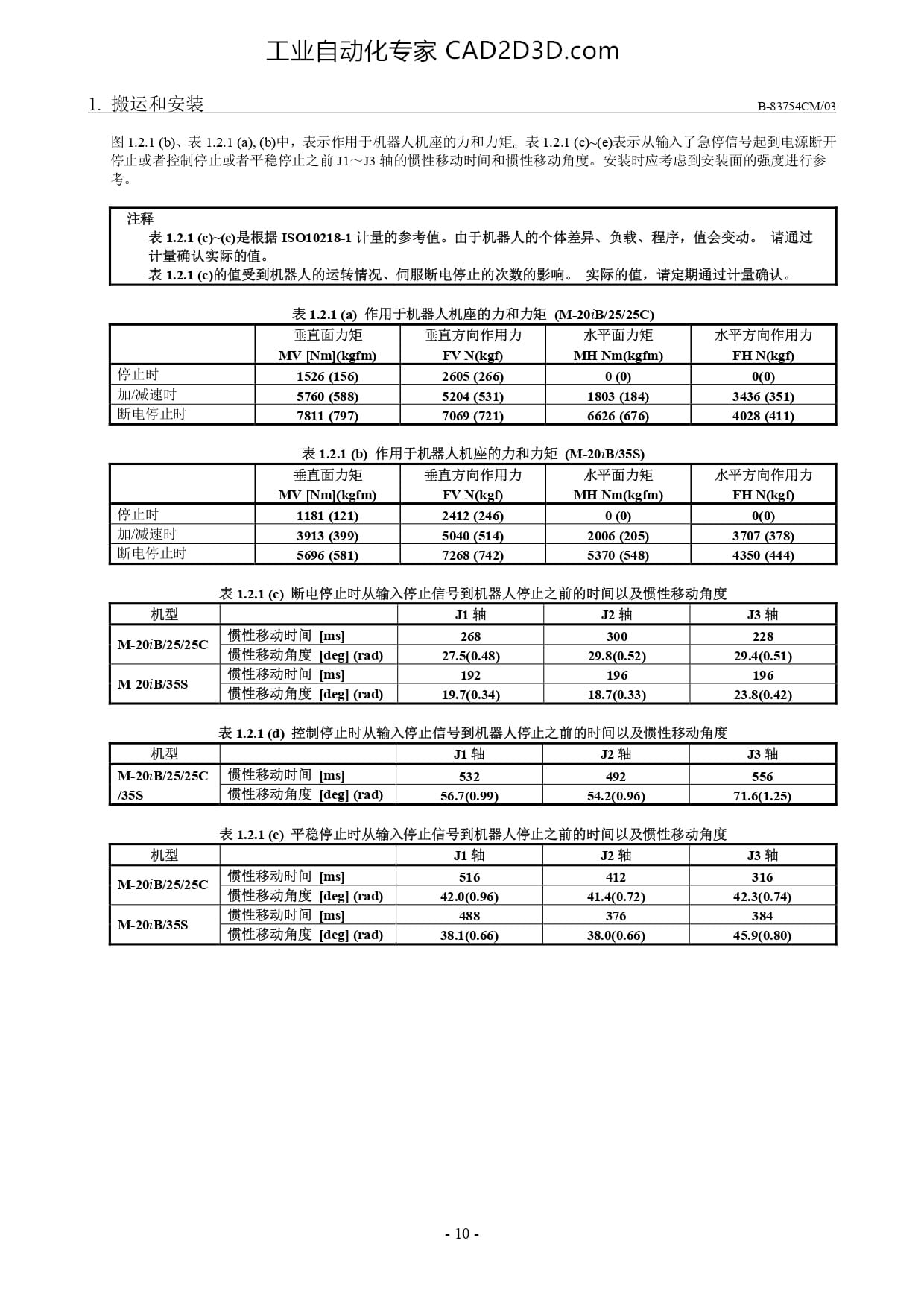
2.1 (a), (bj 中 , 表 示 作 用 于 机 器 人 机 座 的 力 和 力矩 。 表 1.2.1 (9~(e) 表 示 从 输入
或 者 平稳 停止 之 前 卫 一 芒 轴 的 惯性 移 :
动 时 间 和 惯性 移动 角度 。 安 装 时 应 考虑
B-83754CM/03
起 到
的 强度
表 1.2.1 (ec~(e) 是 根据 ISO10218-1 计量 的 参考 值 。 由 于 机 器 人 的 个 体 差异 、 负 载 、 程 序 , 值 会 变动 。 请 通过
计量 确认 实际 的 值 。
表 1.2.1(@) 的 值 受到 机 器 人 的 运转 情况 、 伺 服 断 电 停止 的 次 数 的 影响 。 实际 的 值 , 请 定期 通过 计量 确认 。
停止 时
表 1.2.1(a) 作用 于 机 器 人 机 座 的 力 和 力矩 (ML20iB/2S/2SC)
1526 (156)
垂直 方向 作用 力
FVNGkgD
2605 (266) 0(0)
水 平方 向 作用 力
FHN(kg
0(0)
It
T/
5760 (588)
5204 (531) 1803 (184)
3436 (351)
停止 时
1181 (121)
表 1.2.1 (b) 作用 于 机 器 人 机 座 的 力 和 力矩 (ML20iB/35S)
垂直 方向 作用 力
2412 (246)
水 平方 向 作用 力
0(0)
加 /减速 时
3913 (399)
5040 (514) 2006 (205)
3707 (378)
断 电 停止 时
M-20:B/25/25C
惯性 移动 时 间 [msl
惯性 移动 角度 [deg] (rag)
M-20:B/355
M-20:B/25/25C
/35S
M-20:B/25/25C
惯性 移动 时 间 [msl
惯性 移动 角度 [deg] (rag)
惯性 移动 时 间 [msl
惯性 移动 角度 [deg]l Cag)
惯性 移动 时 间 [msl
惯性 移动 角度 [deg] (rag)
42.0(0.96) 41.4(0.72)
42.3(0.74)
M-20:B/355
惯性 移动 时 间 [msl
384
惯性 移动 角度 [deg] (rag)
- 10-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)