关于负载设定
工业 自动 化 专家 CAD2D3D.com
4 安装 设备 到 机 器 人 上 B-82274CM/12
4.3
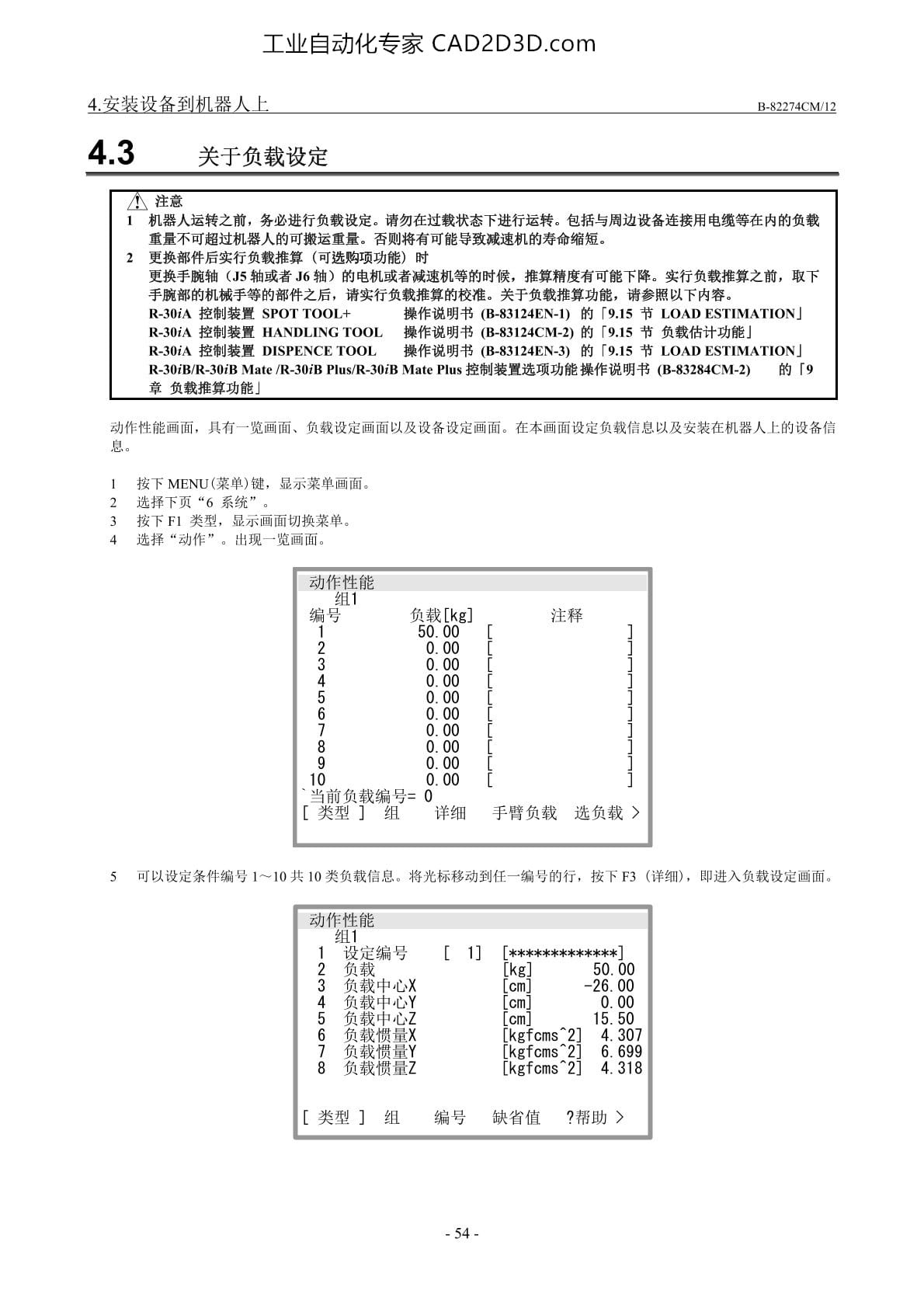
动作 性 能 画面 , 具 有 一 览 画面 、 负 载 设 定 画面 以 及 设备 设 定 画面 。 在 本 画面 设 定 负载 信
上 wb 一
5
关于 负载 设 定
企 注意
机 器 人 运转 之 前 , 务 必 进 行 负载 设 定 。 请 勿 在 过 载 状态 下 进行 运转 。 包 括 与 周边 设备 连接 用 电缆 等 在 内 的 负载
重量 不 可 超过 机 器 人 的 可 搬运 重量 。 否 则 将 有 可 能 导致 减速 机 的 寿命 缩短 。
更 换 部 件 后 实行 负载 推算 〈 可 选 购 项 功能 ) 时
更 换 手 腕 轴 〈J5 轴 或 者 J6 轴 ) 的 电机 或 者 减速 机 等 的 时 候 , 推 算 精 度 有 可 能 下 降 。 实 行 负载 推算 之 前 , 取 下
1
手腕 部 的 机 械 手 等 的 部 件 之 后 , 请 实行 负载 推算 的 校准 。 关 于 负载 推算 功能 , 请 参照 以 下 内 容 。
R-30iA 控制 装置 SPOT TOOL+ 操作 说 明 书 (B-83124EN-D 的 「9.15 节 LOAD ESTIMATION1]
R-30iA 控制 装置 HANDLING TOOL ”操作 说 明 书 (B-83124CM-2) 的 「9.15 节 负载 估计 功能
R-30iA 控制 装置 DISPENCE TOOL 。 操作 说 明 书 (B-83124EN-3) 的 「9.15 节 LOAD ESTIMATION|]
R-30iB/R-30iB Mate /R-30iB Plus/R-30iB Mate Plus 控制 装置 选项 功能 操作 说 明 书 (B-83284CM-2) ”的 「9
章 负载 推算 功能 |
\ 以 及 安装 在 机 器 人 上 的 设备 信
按 下 MENU (菜单 ) 键 , 显 示 菜 单 画面 。
选择 下 页 “6 系统 ”。
显示 夯 面 切换 菜单 。
。 出 现 一 览 画面 。
动作 性 能
组 1
&
an
S © 0D UTA LN =
=
o
可 以 设 定 条 件 编号 1 一 10 共 10 类 负载 信息 。 将 光标 移动 到 任 一 编号 的 行 , 按 下 F3 (详细 ) , 即 进入 负载 设 定 画面 。
动作 性 能
组
e
e
t
将
o
[ 1] sk ]
[kg] 50. 00
[cm] -26. 00
[cm] 0.00
[em] 、 15.50
[kgfcms` 2] 4.307
[kgfcms`2] 6.699
[kgfcms 2] 4.318
55
)
=5
SRR is
=
3nisnie
b=
Bemabbas
N—(><;\1—<><
=
缺 省 值 ?帮助 >
-54.-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)