3 维广域传感器顶点检出工具
工业 自动 化 专家 CAD2D3D.com
B-83304CMI04
处 理 时 间
显示 去 除 多 余 的 3 维 点 所 需 的 时 间 〈 单 位 :
检 出 结果 表
显示 如 下 值 。
数
总 点
示 3 维 分 布 图 内 的 全 部 3 维 点 数 。
去 除 点 数
显示 作为 多 余 的 3
去 除 的 3 维
剩余 点 数
显示 尚未 被 去 除 的 3 维 点 数 。
7.34.6 ”视觉 参数
此 命令 行 工 具 中 , 没 有 使 用 视觉 参数 而 在 执行 时 从 机 器 人 的 程序 可 被 改写 的 参数
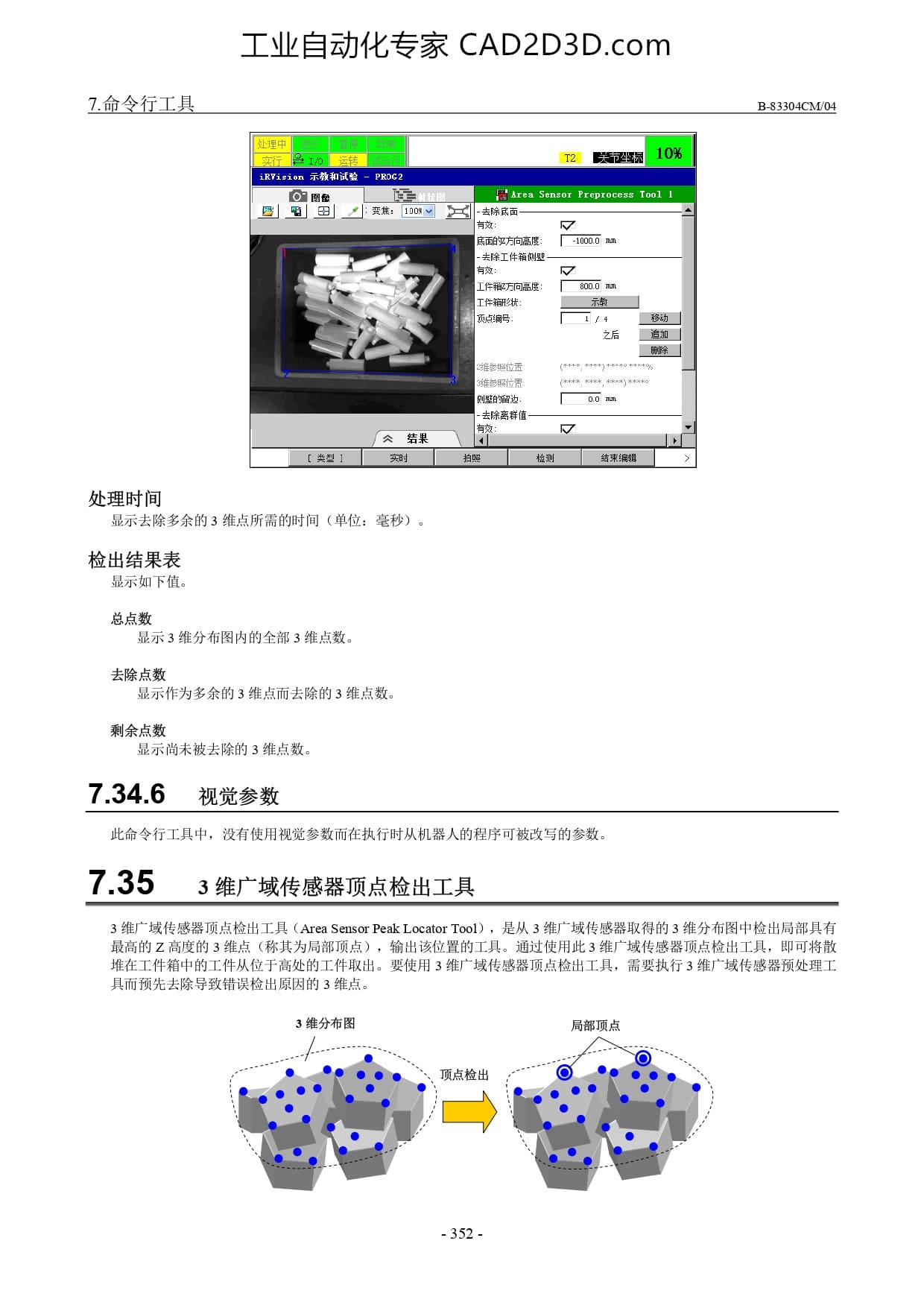
7.35 3 维 广 域 传感器 顶点 检 出 工具
人 域 传感器 取得 的 3 维 分 布 图 中 检 出 局 部 具有
域 传感器 顶点 检 出 工具 , 即 可 将 散
检 出 工具 (Area Sensor Peak Locator Tool) ,
局 部 顶点) , 输 出 该 位 置 的 工具 。 通 过 使 用 此 3 允
需要 执行 3 维 广 域 传感器 预 处 理工
推 在 工件 箱 中 的 工件 从 位 于 高 处 的 工件 取出 。 要 使 用 3 维 广 域 传感器 顶点 检 出 工具 , 需 要
具 而 预先 去 除 导致 错误 检 出 原因 的 3 维 点 。
3 维 分 布 图
局 部 项 点
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)