3 维广域传感器斑点群检出工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工 具 B-83304CM/04
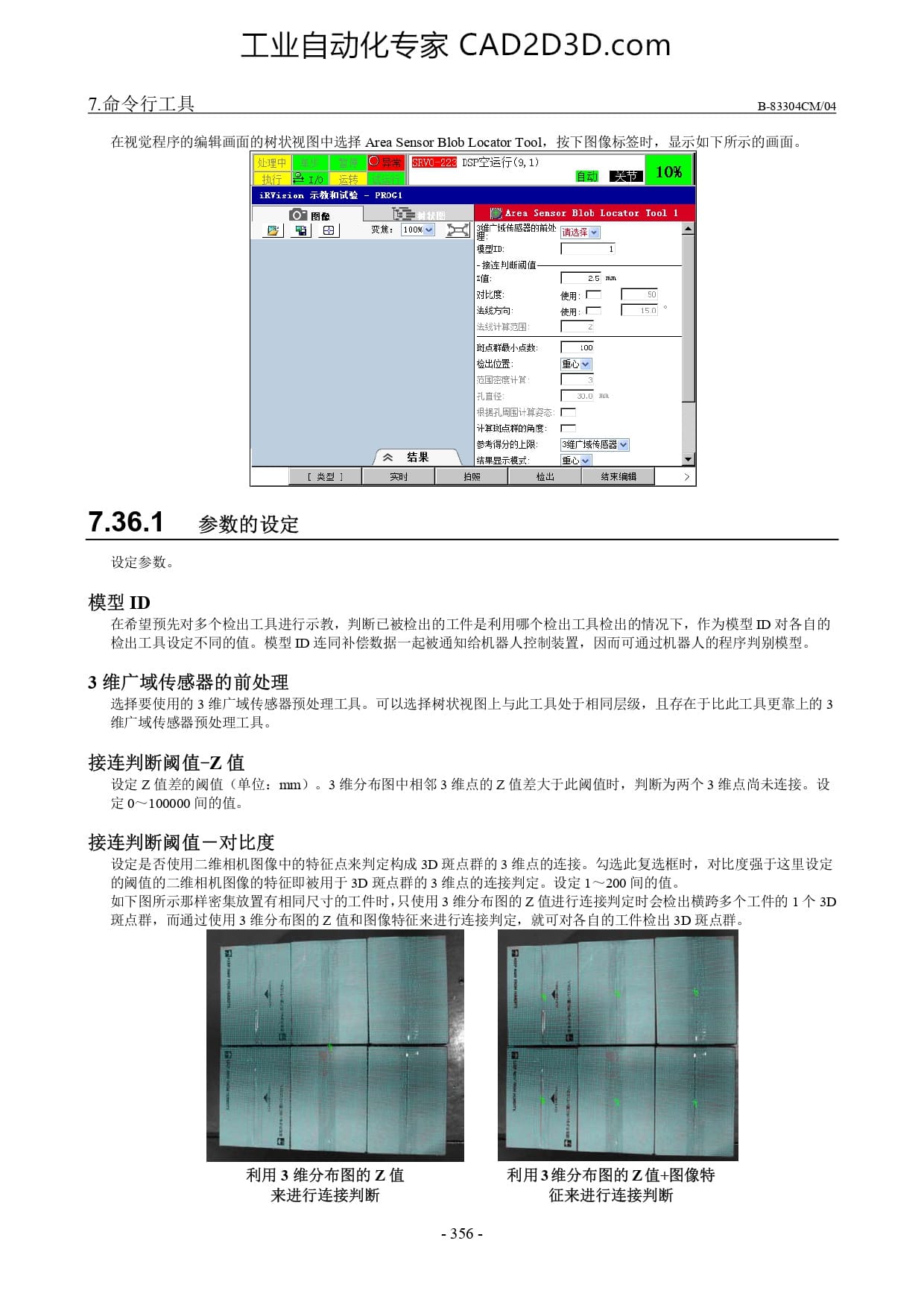
在 视觉 程序 的 编辑 画面 的 树 状 视图 中 选择 Area Sensor Blob Locator Tool, 按 下 图 像 标 签 时 , 显 示 如 下 所 示 的 画面
C R D5PE(T (9, 1)
er Blob Locator Tool 1
- i bl
1
feletes
B
根据 孔 周围 计算 容 态 :
HEREHIAE
获 考 得 分 的 上 限 :
苇 时 显示 模式
7.36.1 ”参数 的 设 定
设 定 参数 。
模型 ID
在 希望 预先 对 多 个 检 出 工具 进行 示 教 , 判 断 已 被 检 出 的 工件 是 利用 哪个 检 出 工具 检 出 的 情况 下 , 作 为 模型 ID 对 各 自 的
检 出 工具 设 定 不 同 的 值 。 模 型 ID 连同 补偿 数据 一 起 被 通知 给 机 器 人 控制 装置 , 因 而 可 通过 机 器 人 的 程序 判别 模型 。
3 维 广 域 传感器 的 前 处 理
选择 要 使 用 的 3 维 广 域 传感器 预 处 理工 具 。 可 以 选择 树 状 视图 上 与 此 工具 处 于 相同 层级 , 且 存在 于 比 此 工具 更 于 上 3
维 广 域 传感器 预 处 理工 具 。
接连 判断 阅 值 -Z 值
设 定 Z B 单位: mm) 。3 维 分 布 图 中 相 邻 3 维 点 的 乙 值 差 大 于 此 阔 值 时 , 判 断 为 两 个 3 维 点 尚未 连接 。 设
定 0 一 100000 间 的 值 。
接连 判断 冰 值 一 对 比 度
设 定 是 否 使 用 二 维 相机 图 像 中 的 特征 点 来 判定 构成 3D 斑点 群 的 3 维 点 的 连接 。 色 选 此 复 选 框 时 , 对 比 度 强 于 这 里 设 定
OO0 SRR IS0 1 3 265 连接 判定 200 间 的 值
布 图 的 己 值 进行 连接 判定 时 会 检 出 横 跨 多 个 工件 的 1 个 3D
就 可 对 各 自 的 工件 检 出 3D 班 点 群
利用 3 维 分 布 图 的 忆 值 利用 3 维 分 布 图 的 乙 值 + 图 像 特
来 进行 连接 判断 征 来 进行 连接 判断
-356 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)