机器人的构成
T
=
自动 化 专家 CAD2D3D.com
B-83754CM/03 3. 基本 规格
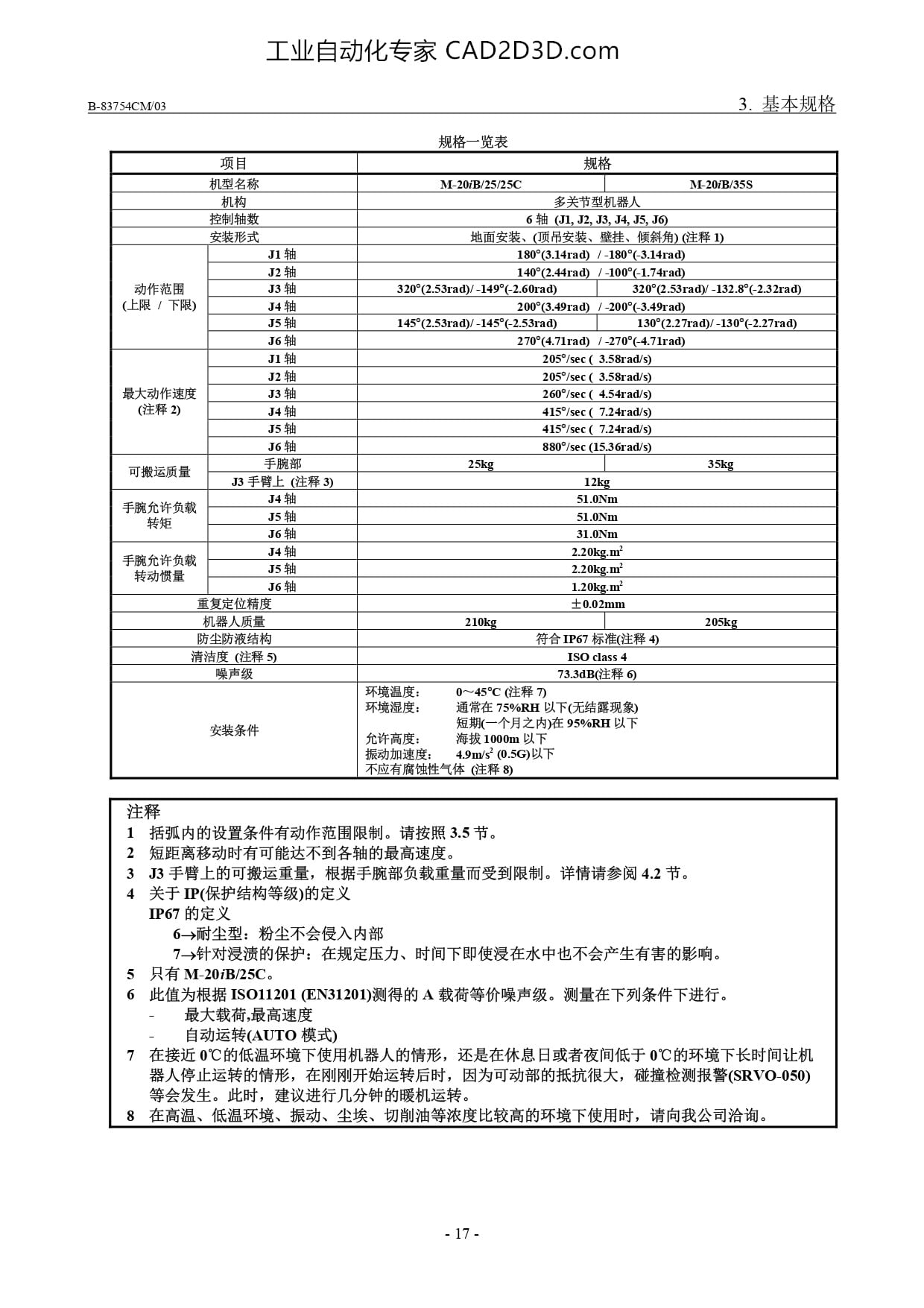
规格 一 览 表
机 型 名 称 M-20iB/25/25C ML20iB/35S
机 构 多 关节 型 机 器 人
控制 轴 数 6 %l (31, 32, 33, 34, J5, J6)
安装 形式 地 面 安装 、( 项 吊 安装 、 壁 挂 、 倾 斜 角 ) (注释 D)
J1 180°(3.14rad) /-180°(-3.14rad)
T2 4 140°(2.44rad) /-100°(-1.74rad)
动作 范 I3 %4 320°(2.53rad)/ -149°(-2.60rad) 320°(2.53rad) -132.8°(-2.32rad)
(上 限 / 下 限 ) 到 轴 200°(3.49rad) /-200°(-3.49rad)
五 轴 145"C.53rad)/-145"C2.53rag 130°(2.27rad)/ -130°(2.27rad)
了 6 轴 270°(4.71rad) /-270°(4.71rad)
J1 4 205°/sec ( 3.58rad/s)
了 2 轴 205°/sec (_3.58rad/s)
最 大 动作 速度 I3 %4 260°/sec (_4.54rad/s)
ERE2) J4 5 415°/sec (_7.24rad/s)
了 5 轴 415%/sec (_7.24rad/s)
36 4 880°/sec (15.36rad/s)
手腕 部
BEBE EREI) 12kg
x 到 轴 51.0Nm
flfiggfifl REE ] 51.0Nm
J6 轴 31.0Nm
于 轴 2.20kg.m’
REE ] 220kg m’
J6 轴 120kg.m
重复 定位 精度 +0.02mm
机 器 人 质量
防 尘 防 液 结构 符合 IP67 标准 (注释 习
清洁 度 (注释 习 ISO class4
噪声 级 73.3dB( 注 释 9
环境 温度 : 0 一 45“C (注释 7)
环境 湿度 : 通常 在 75%RH 以 下 (无 结 露 现象
安装 条 件 . 短期 (一 个 月 之 内 ) 在 95%RH 以 下
人 允许 高 度 : 海拔 1000m 以 下
振动 加 速度 49m/s (0.5G) 以 下
不 应 有 腐蚀 性 气体 注释
可 搬运 质量
手腕 允许 负载
转动 惯量
注释
括 弧 内 的 设置 条 件 有 动作 范围 限制 。 请 按照 3.S 节 。
短 距 离 移动 时 有 可 能 达 不 到 各 轴 的 最 高 速度 。
玉手 臂 上 的 可 搬运 重量 , 根 据 手腕 部 负载 重量 而 受到 限制 。 详 情 请 参阅 4.2 节 。
关于 卫 ( 保 护 结构 等 级 ) 的 定义
卫 67 的 定义
6 一 耐 侍 型 : 粉尘 不 会 侵入 内 部
7 一 针对 浸渍 的 保护 :在 规定 压力 、 时 间 下 即使 浸 在 水 中 也 不 会 产生 有 害 的 影响 。
只 有 M-20 记 /2SC。
此 值 为 根据 ISO11201 (EN31201) 测 得 的 A 载荷 等 价 噪声 级 。 测 量 在 下 列 条 件 下 进行 。
- ”最 大 载荷 ,最 高 速度
- ”自动 运转 (AUTO 模式 )
在 接近 0'C 的 低温 环境 下 使 用 机 器 人 的 情形 , 还 是 在 休息 日 或 者 夜间 低 于 0'C 的 环境 下 长 时 间 让 机
器 人 停止 运转 的 情形 , 在 刚刚 开始 运转 后 时 , 因 为 可 动 部 的 抵抗 很 大 , 碰 撞 检 测报 警 (SRVO-050)
等 会 发 生 。 此 时 , 建 议 进 行 几 分 钟 的 暖 机 运转 。
在 高 温 、 低 温 环境 、 振 动 、 尘 埃 、 切 削 油 等 浓度 比较 高 的 环境 下 使 用 时 , 请 向 我 公司 洽 询 。
-17-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)