惯量负载设定 标准惯量模式和高惯量模式的手腕部允许负载惯量
工业 自动 化 专家 CAD2D3D.com
B-83644CM/06 4. 安装 设备 到 机 器 人 上
4.4 惯量 负载 设 定
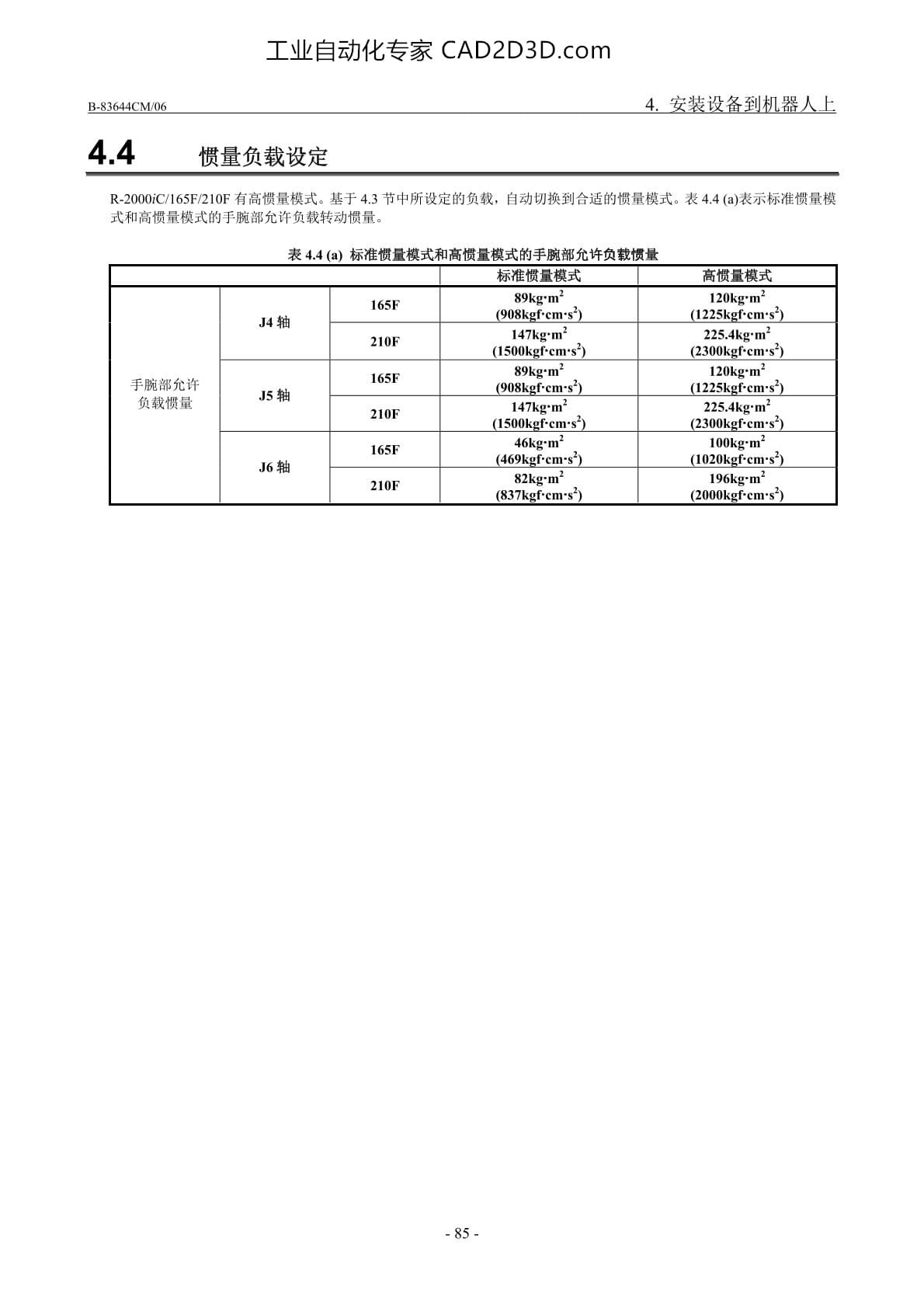
R-2000iC/165F/210F 有 高 惯量 模式 。 基 于 4.3 节 中 所 设 定 的 负载 , 自 动 切换 到 合适 的 惯
高 惯量 模式 的 手腕 部 允许 负载 转动 惯量 。
模式 。 表 4.4 (a) 表 示
表 4.4 (a) 标准 惯量 模式 和 高 惯量 模式 的 手腕 部 允许 负载 惯量
标准 惯量 模式 高 惯量 模式
(908kgfem-s?) (1225kgf-cm-s®)
147kg'm* .
(1500kgf-cm's’) (2300kgf-cm's’)
89kg'm* 120kg'm*
(908kgf-cm-s’) (1225kgf-cm-s’)
147kg'm* 225.4kg'm’
(1500kgf-cm-s?) (2300kgf-cm-s?)
46kg'm* 100kg-m*
(469Kkgf-cm-s’) (1020kgf-cm-s?)
82kg'm® 196kg-m*
(837kgf-cm-s’) (2000kgf-cm-s?)
<85
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)