3 维广域传感器预处理工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工 具 B.83304CMI04
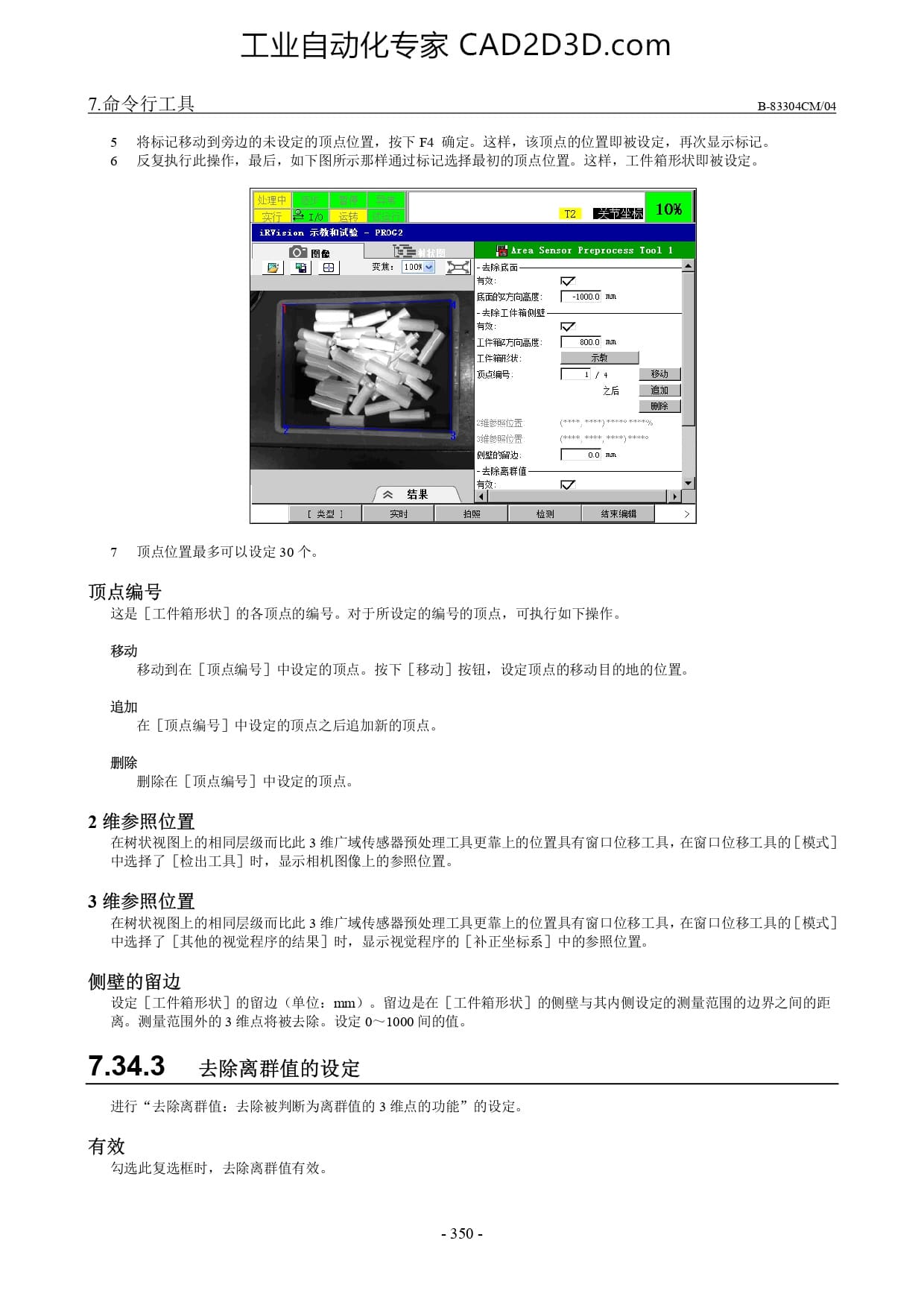
5 ”将 标记 移动 到 旁边 的 未 设 定 的 顶点 位 置 , 按 下 F4 确定 。 这 样 , 该 顶点 的 位 置 即 被 设 定 , 再
6 有 执行 此 操作 , 最 后 , 如 下 图 所 示 那 样 通过 标记 选择 最 初 的 / 置 。 这 样 , 工 件 箱 形
三 -050 mm
-去 除 工件 箱包 时
an 7
Listerms w00 mm
k T
T
7 置 最 多 可 以 设 定 30 个 。
顶点 编号
这 是 [工件 箱 形状 ] 的 各 项 点 的 编号 。 对 于 所 设 定 的 编号 的 顶点, 可 执行 如 下 操作 。
移动
移动 到 在 【项 点 编号 ] 中 设 定 的 项 点。 按 下 [移动 ] 按钮 , 设 定 顶 点 的 移动 目的 地 的 位 置 。
追加
在 [项
中 设 定 的 本
后 追加 新 的
删除
删除 在 【项 点 编号 ] 中 设 定 的 顶点 。
2 维 参照 位 置
在 树 状 视图 上 的 相同 层级 而 比 此 3 维 广 域 伟
中 选择 了 [ 检 出 工具 ] 时 , 显 示 相 机 图 像 上 的
3 维 参 照 位 置
在 树 状 视图 上 的 相同 层级 而 比 此 3 维 广 域
中 选择 了 [其 他 的 视觉 程序 的 结果 ] 时 ,
预 处 理工 具 更 上 的 位 置 具 有 窗口 位 移 工具 , 在 窗口 位 移 工具 的 [模式 ]
的 位 置 具 有
视觉 程序 的 [补正 人 标 系 ] i
口 位 移 工具 , 在 窗口 位 移 工具 的 [模式 ]
置 。
侧 壁 的 留 边
设 定 [工件 箱 形状 ] 的 留 边 〈 mm) 。 留 边 是 在 [工件 箱 形状 ] 的 侧 壁 与 其 内 侧 设 定 的 测量 范围 的 边界 之 间 的 距
离 。 测 量 范 围 外 的 3 设 定 0 一 1000 间 的 值 。
7.34.3 ”去 除 离 群 值 的 设 定
“去 除 离 群 值 :去 除 被 判断 为 离 群 值 的 3
有 效
色 选 此 复 选 框 时 , 去 除 离 群 值 有 效 。
的 功能 ”的 设 定 。
-350 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)