原点位置和可动范围 机械式制动器的位置 J1 轴可动范围
=
T
3. 基本 规格
3.3
自动 化 专家 CAD2D3D.com
原点 位 置 和 可 动 范
B-83754CM/03
H
各 控制 轴 上 , 分 别 设 有 原点 和 可 动 范围 。 控 制 轴 到 达 可 动 范
测 。 只 要 不 是 由 于 伺服 系统 的 异常 和 系统 出 错 等 而 导
步 确保 安全 , 还 提供 采用 机 械 忆
程
行 控制 。
此 外 , 为 了 进 一
1, 32, 33 轴 与 机 械 式 制动器 冲撞 时 , 机 械 式 制动器 在 结构 上 将 会 变形 并 吸收 冲撞 , 使 得 机 器 人 停止。
妇 图 3.3 (9) 进 行 更 换 。 请 勿 进行 机 械 式 制动器 的 改造 等
时 , 需 要 进行 更 换 , 请 参
进行 超
围 而 进
极限 , 叫 做 超 程 (oOT)。 各 轴 都 在 可 动 范围 的
Ye 置 丢 失 , 都 要 为 避免 机 器 人 的 动作 超出 可
动 器 的 可 动 范围 限制 。
机 械 式 制动器 变形
。 否 则 有 可 能 导致 机 器 人 不 能 正常 停止 。
了 轴 机 械 式 制 动 器
( 负 侧 )
(和
( 正 侧 )
了 轴 机 械 式 制动器
Sy )l
a2 B HIZ) 2
I1 HHURR I 8
” 人 A290-7226-X206
, 螺栓 M12x401 个
持 紧 力矩 129Nm)
选择 也 轴 机 械 式 制动器 时
ME20iB/25/35S
, A05B-1226.H0S1
A290-7226-X235
e
J M-20iB/25C
, A05B-1226-H054
, A290-7226-Y203
, 螺栓 MI2x30 2 个
持 紧 力矩 94Nm)
图 3.3 (b) 一 3.3 人 中 示 出 各 轴 的
* ”可 动 范围 可 以 变更 。
变更 详情 , 请
图 3.3 (a) 机 械 式 制动器 的 位 置
、 可 动 范围 、 以 及 机 械 式 制动器 位 置 。
参阅 第 6 章 “ 变 更 可 动 范围 ”
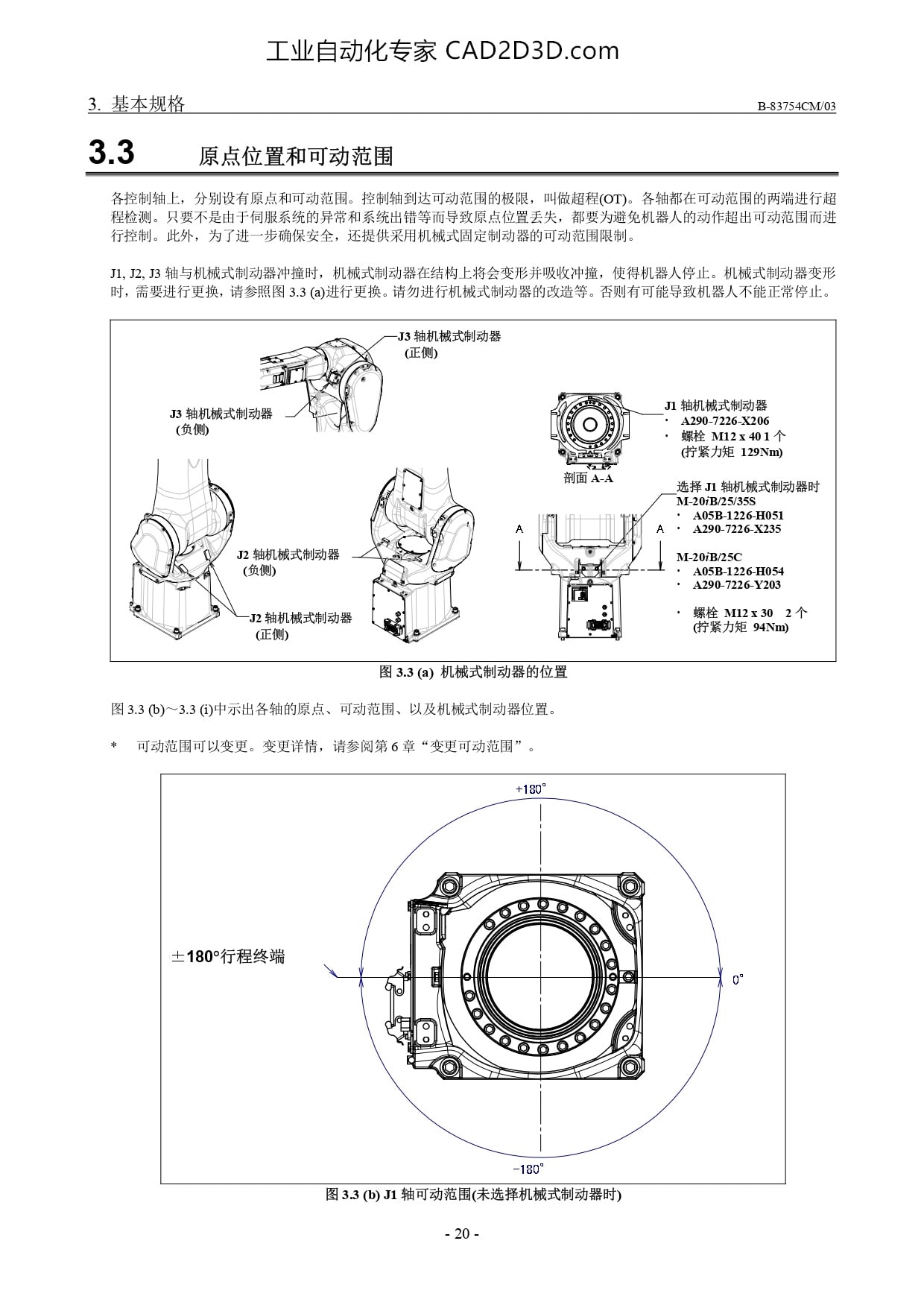
士 180。 行 程 终端
+180”
-180°
图 33 (b) JI1 轴 可 动 范围 (未 选择 机 械 式 制动器 时 )
-20-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)