RV-C 系列 旋转方向与速比
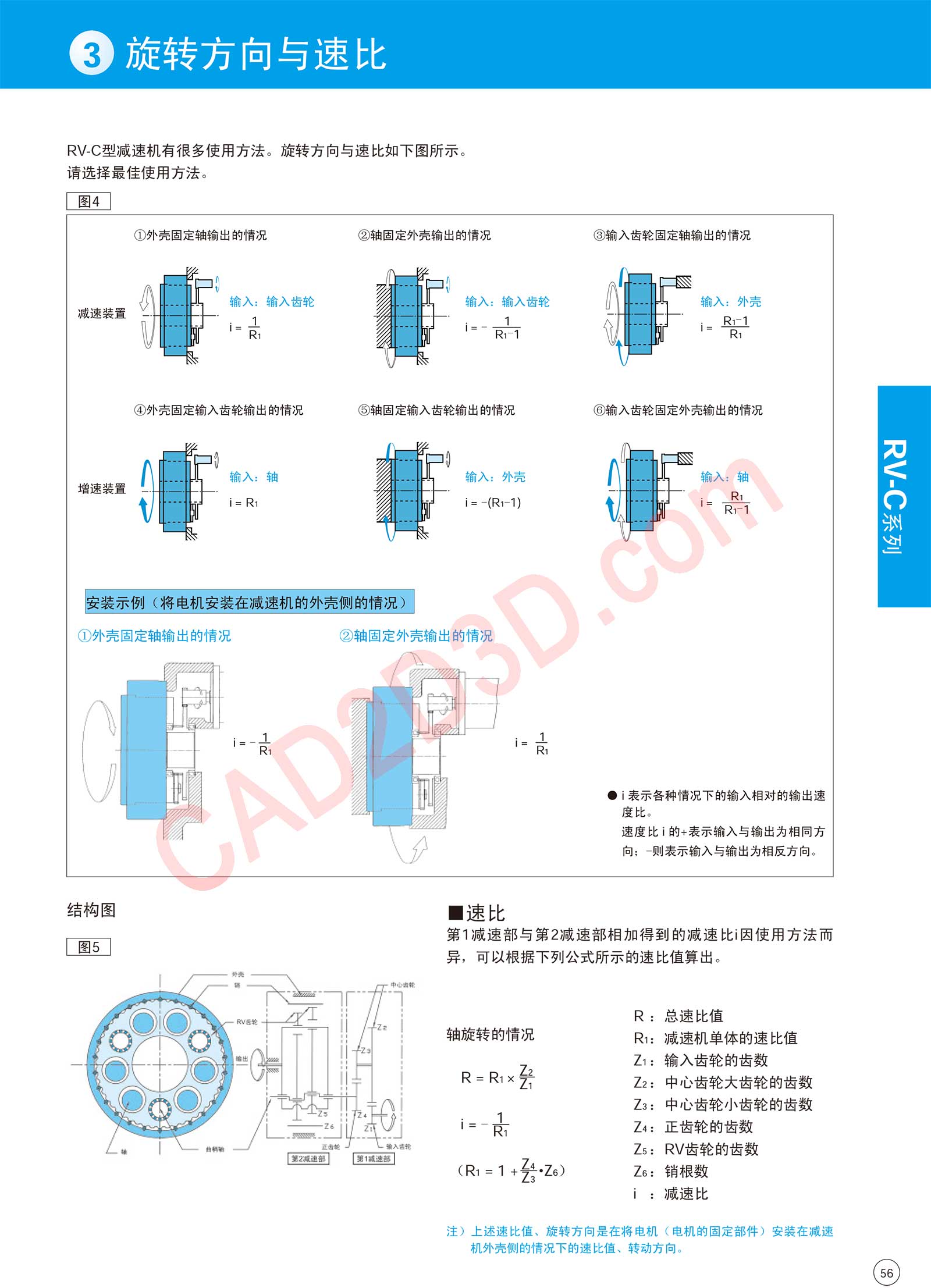
个旋转方向与速比 RV-C 型减速机有很多使用方法。旋转方向与速比如下图所示。请选择最佳使用方法。图 4名外壳固定轴输出的情况回轴固定外壳输出的情况 @ 输入齿轮固定轴输出的情况1 1输入 : 输入齿轮输入 : 输入齿轮减速装置”一 -y : 1SR =R@I FEERAN SR R 回轴固定输入齿轮输出的情况 @@ 输入齿轮固定外壳输出的情况1输入 : 轴输入 : 外壳输入 : 轴增速装置”- . . L) . Li= Ri i= -(Ri-1T) i= =Ri1 包外壳定轴输出的情况加轴固定外壳输出的情况四 i 表示各种情况下的输入相对的输出速度比。速度比 i 的 + 表示输入与输出为相同方向,- 则表示输入与输出为相反方向。结构图国速比第 1 减速部与第 2 减速部相加得到的减速比 i 因使用方法而异,可以根据下列公式所示的速比值算出。 R : 总速比值轴旋转的情况 Ri: 减速机单体的速比值=5 Z1: 输入齿轮的齿数R= Rix2 Z2 :中心齿轮大齿轮的齿数Zs : 中心齿轮小齿轮的齿数=i Z4: 正齿轮的齿数Z5: RV 齿轮的齿数(CR = 1 + 条 .Z6) Ze: 销根数i : 减速比注 ) 上述速比值、旋转方向是在将电机《电机的固定部件 ) 安装在减速机外壳侧的情况下的速比值、转动方向。 �

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)