3 维广域传感器斑点群检出工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工 具 B-83304CM/04
构成 3 维 斑点 群 的 3 维 点
在 [范围 密度 计算 ] 中 设 定 的 值
密度 测量 范围
孔 直径
在 [检测 位 置 ] 中 选择 [和 孔 的 位 置 ] 时 , 设 定 要 检测 的 3 维 斑点 群 上 的 孔 的 直径 〈 单 位 : mm) 。 检 测 最 靠近 设 定 值 的
直径 的 孔 。 设 定 15 一 1000 间 的 值 。
根据 孔 周围 计算 姿态
[检测 位 置 ] 中 选择 [ 孔 的 位 置 ] 时 , 设 定 有 效 ' 无 效 。 [根据 孔 周围 计算 姿态 ] 有 效 时 , 只 使 用 已 检测 的 孔 周围 的 3 维
点 来 计算 平面 。 [根据 孔 周围 计算 姿态 ] 有 效 时 ,【『 计算 平面 ] 无 效 。 如 下 图 所 示 那 样 , 与 3 维 斑点 群 上 主要 的 面 不 同
的 面 上 有 孔 , 希 望 对 检测 对 象 的 姿态 也 进行 测量 时 将 其 设 为 有 效 。
根据
在 [根据 孔 周围 计算 姿态 ] 被 设 定 为 有 效 时 ,
在 姿态 计算 中 使 用 3 维 点 |
使 用 的 区 域
/
总
计算 斑点 群 的 角度
选择 是 否 计算 3 维 斑点 群 的 角度 。 [计算 斑点 群 的 角度 ] 被 设 定 为 有 效 时 , 从 \t 方 向 看 到 的 3 维 斑点 群 的 长 边 方向 的
角度 将 被 作为 检测 结果 的 角度 而 输出 。
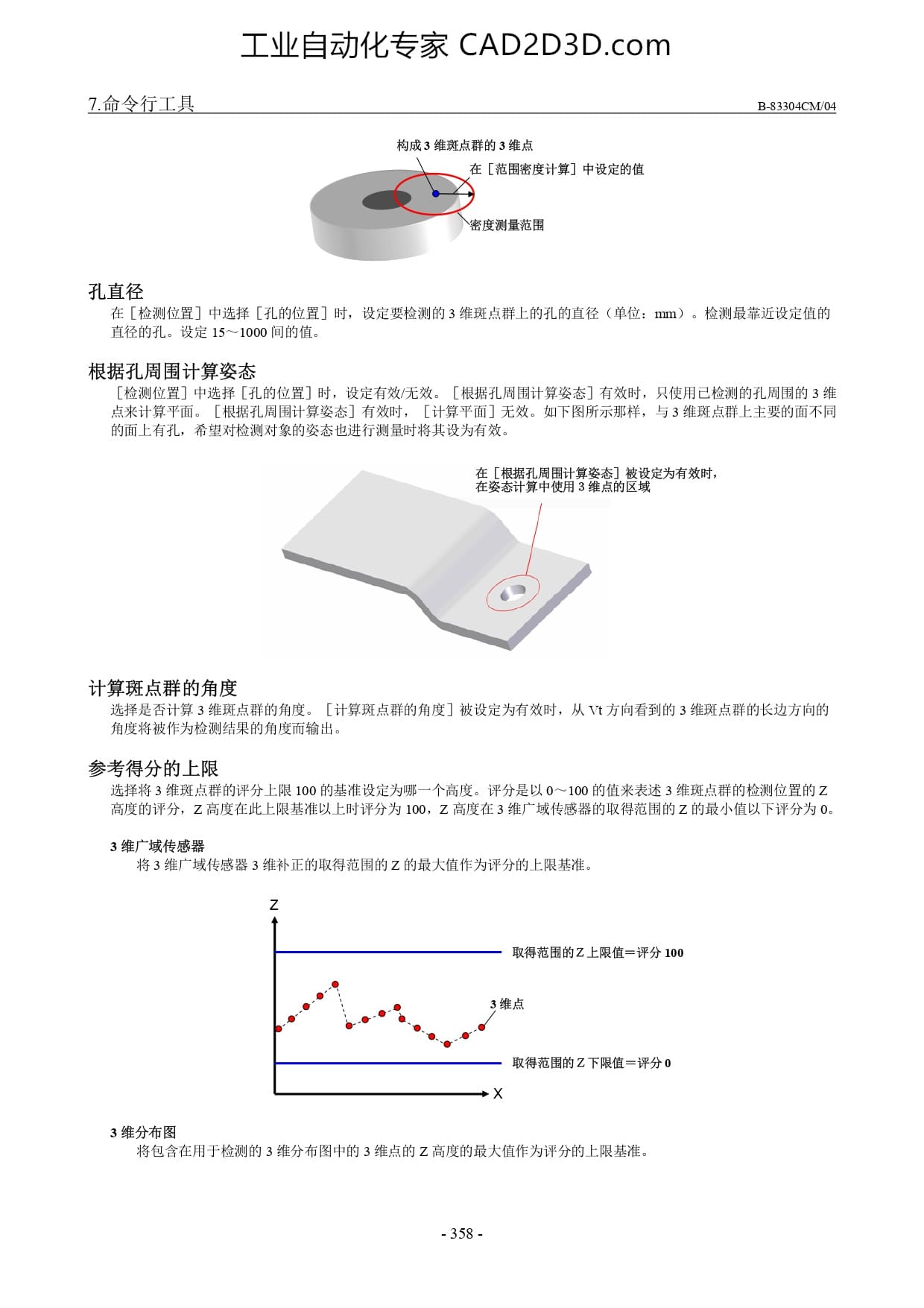
参考 得 分 的 上 限
选择 将 3 维 班 点 群 的 评分 上 限 100 的 基准 设 定 为 哪 一 个 高 度 。 评 分 是 以 0 一 100 的 值 来 表述 3 AERERCBHIN KNG BAY 2
高 度 的 评分 ,Z 高 度 在 此 上 限 基准 以 上 时 评分 为 100,Z 高 度 在 3 维 广 域 传感器 的 取得 范围 的 Z 的 最 小 值 以 下 评分 为 0。
3 维 广 域 传感器
将 3 维 广 域 传感器 3 维 补正 的 取得 范围 的 Z 的 最 大 值 作为 评分 的 上 限 基准 。
取得 范围 的 Z 上 限 值 = 评 分 100
取得 范围 的 Z 下 限 值 = 评分 0
3 维 分 布 图
将 包含 在 用 于 检测 的 3 维 分 布 图 中 的 3 维 点 的 Z 高 度 的 最 大 值 作 为 评分 的 上 限 基准 。
-358 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)